Budowa silnika indukcyjnego z trzema fazą:
Trzy -fazowy silnik indukcyjny Budowanie konwertera ma następujące zalety na linii odżywionej na linii:
1. Rozpoczęcie prania jest gwarantowane przez zmienną częstotliwość od dołu
2. Uruchamianie i przyspieszenie prądu i momentu obrotowego jest możliwe.
3. Sieć nie podlega już wysokiego prądu przepięcia, tak jak w przypadku bezpośredniego przełącznika na budowę silników indukcyjnych w klatce, i jako taki, specjalny sprzęt startowy można pominąć nawet na wysokie szanse.
4. Wiele momentów bezwładności można przyspieszyć bez konieczności wymiaru silnika.
5. Konwerter działa jako urządzenie oddzielające.
W związku z tym informacje zwrotne silnika w punkcie zwarcia nie występują, gdy krótkie linie linii, ocena zwarcia, na podstawie której największa liczba usług musi być wyolbrzymiona, jest zatem niska, co pozwala na wykonanie gospodarki.
Jak już wskazano, prędkość konstrukcji silnika indukcyjnego z trzema fazą można kontrolować, zapewniając stojanowi zmienne napięcie, zmienne zasilanie częstotliwości przy użyciu statycznych przetworników częstotliwości.
Kontrola prędkości jest również możliwa poprzez zasilanie zasilania w układzie zasilania za pomocą konwerterów w obwodzie wirnika. Zasadniczo istnieją dwie różne metody kontroli prędkości.
1. Szkolenie kontroli kontroli kontroli Kontrola Kontrola Wolność, gdy stojan jest zasilany ze stałego napięcia, rur stałej częstotliwości.
2. Sterowanie silnika z wykorzystaniem zmiennego napięcia o zmiennej częstotliwości, obsługując silnik z stałą częstotliwością wirnika.
Kontrola prędkości według zmiany częstotliwości poślizgu jest uzyskiwana w następujący sposób:
1. Kontrola napięcia stawu za pomocą trzypoziomowego kontrolera napięcia.
2. Kontrola oporu wirnika za pomocą oporu kontrolowanego przez helikopter w obwodzie wirnika.
3. Korzystanie z kaskady konwertera w obwodzie wirnika w celu odzyskania energii przesunięcia.
4. Korzystanie z cyklokonterau w obwodzie wirnika.
Kontrola silnika indukcyjnego przez zmienność napięcia stojana (przy użyciu trójstronnego kontrolera napięcia)
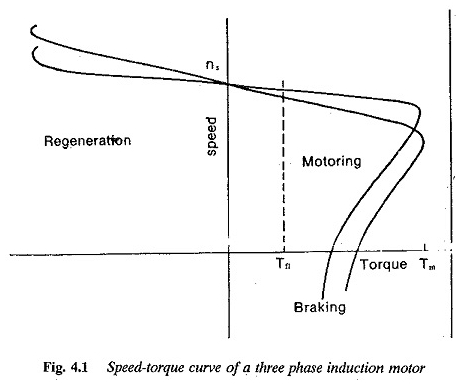
Bardzo dobrze wiadomo, że moment obrotowy konstrukcji trzy -fazowych silników indukcyjnych zmienia się bezpośrednio w proporcji do kwadratu napięcia. Moment obrotowy silnika indukcyjnego jest w przybliżeniu podana przez

A krzywa prędkości momentu obrotowego jest pokazana na rysunku 4.1. Przesuwanie maksymalnego momentu obrotowego jest podane przez 
który jest niezależny od napięcia stojana. Można to jednak zmieniać w zależności od zmiany rezystancji wirnika. Maksymalna wartość momentu obrotowego jest podana przez

Zmienia się również jak kwadrat zastosowanego napięcia. Jeśli napięcie zostanie zmniejszone do 80%, maksymalny moment obrotowy spada do 64%. Zmienność zastosowanego napięcia jest uzyskiwana za pomocą kontrolera napięcia.
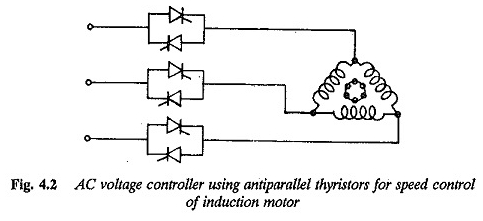
Ta metoda kontrolowania prędkości silnika indukcyjnego jest prosta i ekonomiczna. Kontrola napięcia stojana jest uzyskiwana za pomocą kontroli fazowej antyrównoległych tyrystorów, połączonych jak wskazano na rycinie 4.2.
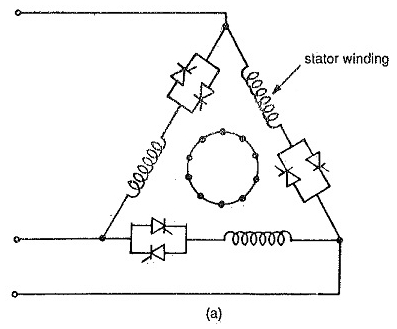
Ryciny 4.3 (a) i (b) ilustrują dwa praktyczne połączenia kontrolera napięcia, które dostarczają konstrukcję silnika z indukcją trzech faz. W związku z rysunkiem 4.2 tyrystory muszą jedynie zarządzać prądem fazowym. Prądy harmoniczne stają się wyższe. Na rycinie 4.3 kara harmoniczna jest raczej więcej.
Napięcie stojana może wahać się od wartości od zera do pełnej w zakresie narożnika wyzwalacza. Współczynnik linii po stronie linii jest bardzo mierny z powodu harmonicznych i mocy reaktywnej z powodu kontroli fazowej.
Gdy silnik indukcyjny klatki jest zasilany ze zmiennego zasilania napięcia do kontroli prędkości, można dokonać następujących obserwacji:
1. Prędkość momentu obrotowego poza maksymalnym punktem momentu obrotowego ma ujemny kształt. Stabilny punkt roboczy w tym regionie nie jest możliwy dla stałego obciążenia momentu obrotowego.
2. Kontroler napięcia powinien być w stanie wytrzymać wysoki rozruch, zakres kontroli prędkości jest raczej ograniczony.
3. Współczynnik mocy silnika jest słaby.
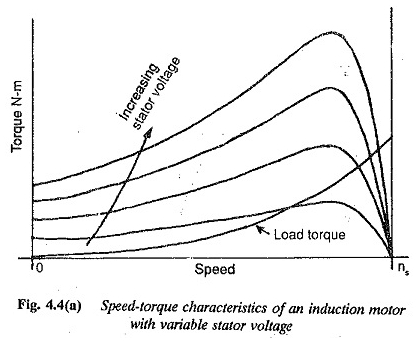
Aby uniknąć powyższych trudności, budowa trójfazowego silnika indukcyjnego musi mieć wirnik o wysokiej oporności. To sprawia, że maksymalny punkt zmiany momentu obrotowego do s = 1, zmniejszając w ten sposób niestabilny obszar krzywej prędkości.
Ze względu na wzrost oporu wirnika prąd początkowy maleje, współczynnik mocy poprawia się, a zakres kontroli prędkości wzrasta.
Metoda kontroli prędkości jest zatem korzystna z wirnikiem o wysokiej oporności. Krzywe prędkości momentu obrotowego dla tej kontroli przedstawiono na rysunku 4.4 (a). Bieżąca nuta kontrolera decyduje o możliwym momencie obrotowym przy każdej prędkości.
Krzywa limitu momentu obrotowego w zależności od prędkości można wyprowadzić. Rysunek 4.4 (b) pokazuje tę krzywą limitu momentu obrotowego dla notacji projektowej kontrolera, która jest trzykrotnie nominalnym prądem silnika. Reprezentowany jest prąd jako funkcja prędkości i napięcia stojana.
Podczas kontroli, jeśli wartość bieżąca przekroczy wartość limitu, należy użyć automatycznego limitu prądu. Dzięki temu wartość kąta strzelania jest dostosowywana, aż upoważniony prąd krąży.
Nawet jeśli metoda jest prosta i ekonomiczna, straty motoryczne rosną wraz ze wzrostem zmiany. Wzrost strat można przypisać wzrostowi prądu silnika z powodu spadku przepływu przestrzeni powietrznej, a także wysokiej rezystancji wirnika.
Stosunek R1 / R’2 można uznać za reprezentatywny, aby podjąć decyzję o tych stratach, ponieważ wzrost oporu jest decydujący w ograniczeniu obecnego narysowania. Wydajność silnika może być w przybliżeniu podana przez
![]()
gdzie S jest przesuwaniem silnika.
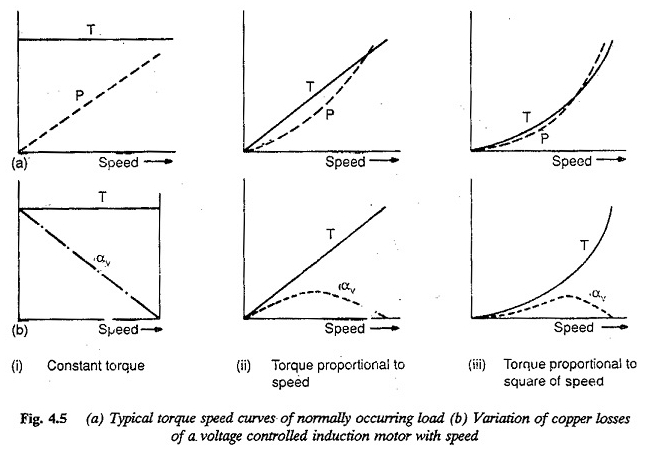
Rodzaj obciążenia napędzanego przez silnik wpływa na rysowany prąd i straty silnika w miarę różnic. Normalnie wykonujące opłaty to
1. Wygodne obciążenia momentu obrotowego
2. Zmienna zorganizowana proporcjonalna do prędkości
3. Totor zmienna proporcjonalna do kwadratu prędkości

Weź pod uwagę, że charakterystyka prędkości ładowania obciążenia jest podawana przez ogólne równanie
![]()
Jeśli wartość x = 0, jest ona równoważna ze stałym obciążeniem momentu obrotowego. X> 0 dla zmiennych obciążeń momentu obrotowego (ryc. 4.5a).
Straty miedzi wirnika
![]()
gdzie PD1 jest mocą przestrzeni powietrznej lub wejścia do zasilania wirnika.

Ale przesuwanie silnika
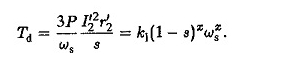
i wejście zasilania wirnika
![]()
Maksymalna wartość mocy przeniesiona do wirnika jest
![]()
Straty miedzi, gdy są wyrażone jako raport PD1max, który mamy
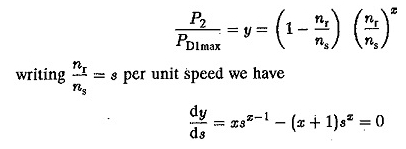
Dla wartości SAT, która jest maksymalna. Wartość

Dla maksymalnej wartości utraty miedzi wirnika. Maksymalne wartości strat miedzi wirnika są podane przez

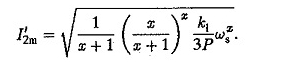
Wraz ze wzrostem wartości x wartość YM maleje. Można również określić maksymalną wartość prądu wirnika i prędkość jednostki, do której występuje. Mamy
z którego prąd wirnika
![]()
przez jednolitą prędkość dla maksymalnej wartości prądu wirnika jest również
![]()
Maksymalną wartość prądu wirnika można określić jako
W przypadkach specjalnych
Zmienność strat jest reprezentowana na rysunku 4.5 (b) dla różnych rodzajów obciążeń. Stałe obciążenia momentu obrotowego nie są faworyzowane ze względu na wzrost kiepskich strat wraz z przesunięciem i staje się maksymalny do S = 1,0.
Jest to oczywiste, od zmiany przepływu, ponieważ napięcie jest zróżnicowane w celu kontroli prędkości. Aby utrzymać stały moment obrotowy, silnik przyciąga ciężki prąd, który prowadzi do słabego momentu obrotowego / amperu, słabej wydajności i złego współczynnika mocy przy niskiej prędkości.
Gdy moment obrotowy zmienia się w bezpośrednim proporcji do przyspieszenia, straty miedzi mają maksymalną wartość 25% mocy nominalnej przy prędkości 0,5 Ω.
W przypadku par proporcjonalnych do kwadratu prędkości prędkość jednostkowa, do której straty miedzi są maksymalne, wynosi 2/3, a maksymalna wartość strat miedzi wynosi 0,149 mocy nominalnej.
Metodę sterowania prędkością może być korzystna dla obciążeń pompy lub wentylatora, gdzie moment obrotowy jest proporcjonalny do kwadratu prędkości.
Z powyższej dyskusji ta metoda kontroli prędkości jest odpowiednia tylko dla następujących przypadków:
1. W przypadku operacji krótkoterminowych, w których zdefiniowano czas kontroli prędkości.
2. Aby kontrolować prędkość dmuchaw lub pomp z parabolicznymi lub sześciennymi wariantami momentu obrotowego z prędkością. Nie jest to odpowiednie do stałego obciążenia momentem obrotowym z powodu wzrostu strat i ogrzewania.
3. Aby kontrolować prędkość silnika z słabą wydajnością przy normalnym działaniu.
Rodzaj obciążenia (moment obrotowy w zależności od prędkości obciążenia) silnika napędowego wpływa na straty w silniku. Fale wejściowe nieinusoidalne powodują prądy nieinusoidalne, które zwiększają straty harmoniczne.
W związku z tym całkowite straty wzrastają w szczególności przy niskich prędkościach, a straty te powodują możliwe zwężenie silnika lub silnik nadmiernie wymiarowy należy zastosować, gdy zastosowano tę metodę.
Dla obciążeń typu dmuchania, gdzie t α N2, maksymalna wartość prądu występuje z prędkością 2/3 prędkości podstawowej. Ten prąd zależy od całkowitego obciążenia silnika silnika. W przypadku dużych silników ślizgowych (wirniki o wysokiej oporności) maksymalny prąd do prądu nominalnego maleje.
W przypadku stałego obciążeń momentu obrotowego straty mocy rosną wraz ze zmniejszeniem prędkości i osiąga maksymalną wartość przy samej prędkości zerowej. W przypadku obciążeń T α N maksimum występuje przy 1/2, podstawowa prędkość i straty wynoszą 25% mocy stojana.
Straty zachodzące w silniku są odpowiedzialne za wzrost temperatury silnika. Straty należy przechowywać w autoryzowanej wartości, aby silnik nadal działał z autoryzowanym wzrostem temperatury. Różne rodzaje omawianych opłat zwykle zwiększają straty motoryczne.
Ponadto przebieg napięcia wejściowego jest zniekształcony. Prądy stojana i wirnika są nie -sinusoidalne z bogatą zawartością harmoniczną. Te harmoniczne powodują dodatkowe straty. Można je uznać za 50% nominalnych strat miedzi.
Wzrost strat motorycznych wraz z dużymi zmianami prowadzi do zwężenia silnika. Normalny silnik można zwolnić z 5 do 6 razy. Jeśli stosuje się wirnik o wysokiej odporności, czynnik przewiewny maleje.
Całkowite straty motoryczne są

Lub
FV zajmuje się wzrostem strat z powodu zniekształceń i zwykle jest uważany za 1,5.
PR to ocena silnika
K1PR to suma utraty miedzi silnika.
Aby utrzymać wzrost autoryzowanej temperatury, autoryzowane straty są

Lub
η to wydajność silnika
αV to związek strat co najmniej prędkości, aby odnotować straty. prędkość.
Ocena PTVP silnika.
Współczynnik αV zależy od rodzaju zastosowanego obciążenia. W przypadku maszyn mocno schłodzonych jest to 1,0 i niezależne od prędkości. Jeśli maszyna jest auto-refroit, zależy to od prędkości. Ta wartość maleje wraz ze spadkiem dolnej granicy prędkości.
Typowa charakterystyka dla maszyny z dwoma biegunami przedstawiono na rysunku 4.5 (c). Na zwężenie wpływa również wydajność silnika. Wraz ze wzrostem wydajności o 1-η / η. W przypadku tego typu silnika sterowania prędkością dużego wirnika stosuje się 17 rezystancji. Mają słabą wydajność. Dlatego zwężenie silnika zmniejsza się.

Powyższa dyskusja wyraźnie wskazuje, że dany silnik jest zniekształcony inaczej, gdy powoduje różne rodzaje obciążeń.
Innymi słowy, moc wymagana przez obciążenie jest stała, silnik napędowy musi mieć różne wymiary dla różnych rodzajów krzywych prędkości obciążenia obciążenia, przykład w zależności od znakomitych.