Charakterystyka prędkości obrotowej silnika indukcyjnego:
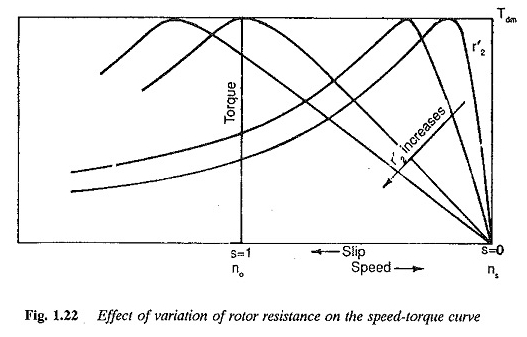
Równania. 1.27 Można zaobserwować, że maksymalny moment obrotowy jest niezależny od oporu wirnika. Jednak przesunięcie, w którym zachodzi maksymalny moment obrotowy, zmienia się wraz z oporem wirnika.
Wraz ze wzrostem oporu wirnika przesuwaniem maksymalnego momentu obrotowego jest również maksymalny moment obrotowy, a stabilny zakres roboczy silnika wzrasta. Typowe cechy prędkości momentu indukcyjnego momentu obrotowego silnika dla różnych wartości rezystancji wirnika przedstawiono na rysunku 1.22.
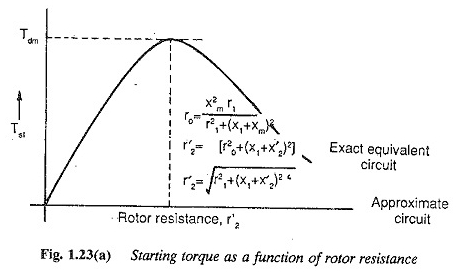
Z figury zauważamy, że początkowy moment obrotowy można zwiększyć poprzez zwiększenie oporu na wirnik. Maksymalny moment obrotowy występuje przy rozpoczęciu, jeśli rezystancja wirnika zostanie zwiększona do wartości.

Jeśli impedancja stojana zostanie zaniedbana, odporność na wirnik musi zostać zwiększona do wartości równej reaktancji wycieków wirnika. Jeśli opór wirnika wzrośnie poza tę wartość, moment początkowy maleje.
Moment awarii występuje w slajdach większych niż jeden (w obszarze hamowania). Prąd początkowy maleje, a początkowy współczynnik mocy jest lepszy dla zwiększonych wartości oporu wirnika.
Zmiany pełnego rozładunku zmiany, ułatwiając kontrolę prędkości w ograniczonym zakresie, gdy opór wirnika jest zróżnicowany. Jednak wydajność jest zmieniana na wysoką oporność na wirnik z powodu wzrostu strat. Ogrzewanie wirnika występuje w z natury wysokiej oporności na wirnik.
Krótko mówiąc, uruchamianie silnika ulepszono przy dużych odpornościach na wirnika, podczas gdy wydajność wyścigów jest zmieniana.
Aby uzyskać zalety wysokiej odporności na wirnik przy uruchomieniu, dodatkowy rezystancja jest połączona w obwodzie wirnika silnika indukcyjnego rany i powoli przecina się w miarę przyspieszenia wirnika. Przy prędkości nominalnej silnik działa na swoją naturalną cechę. Połączenia przedstawiono na rysunku 1.23 (b).
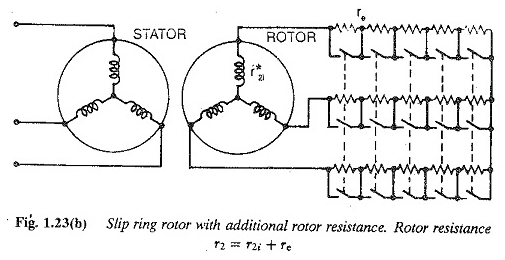
Jednak połączenie dodatkowej oporu nie jest możliwe w silnikach klatki wiewiórkowej. Stosowane są konstrukcje wirników specjalnych, takich jak wirniki podwójne i głęboki pręt.
Po uruchomieniu, ze względu na wysoką częstotliwość wirnika, prąd rozpowszechnia się w zewnętrznej klatce podwójnego przeżyciela klatki lub w górnej części paska w przypadku wirnika głębokiego paska. W ten sposób osiąga się efekt wysokiego oporu.
W miarę przyspieszenia silnika częstotliwość wirnika zmniejsza się, a prąd jest dystrybuowany w dwóch klatkach wirnika podwójnego klatki lub w pełnym pasku w wirnikowym pasku. Skuteczny opór jest niewielki, a wydajność wyścigu uległa poprawie. Typowe krzywe prędkości momentu obrotowego przedstawiono na rysunku 1.23.
Wpływ zmienności napięcia w silniku indukcyjnym:
Kluczową prędkość charakterystyczną silnika indukcyjnego można zmodyfikować na podstawie efektu zmienności napięcia w silniku indukcyjnym. Typowe cechy prędkości momentu indukcyjnego momentu silnika, gdy są one dostarczane ze zmiennego napięcia przy częstotliwości nominalnej, podano na rysunku 1.24 (a).
Opierają się one na fakcie, że moment obrotowy silnika indukcyjnego (z danym zjeżdżalnią) zmienia się jako kwadrat napięcia. Przesunięcie maksymalnego momentu obrotowego jest niezależne od napięcia. Pełny moment obciążenia występuje na różnych przesunięciach, gdy napięcie jest zróżnicowane.
To sprawia, że kontrola prędkości silników indukcyjnych jest możliwa do ograniczonego zakresu według zmienności napięcia zasilania. Jednak pojemność momentu obrotowego silnika maleje przy niskim napięciu, ze względu na zmniejszenie przepływu przestrzeni powietrza. Współczynnik mocy maleje.
Silnik przyciąga ciężkie prądy, aby rozwinąć niski napięcie podane momentem obrotowym. Prąd przyciągnięty do różnych napięć pokazano na rysunku 1.24 (a), a także moment obrotowy opracowany przy prądu nominalnym przy różnych napięciach.
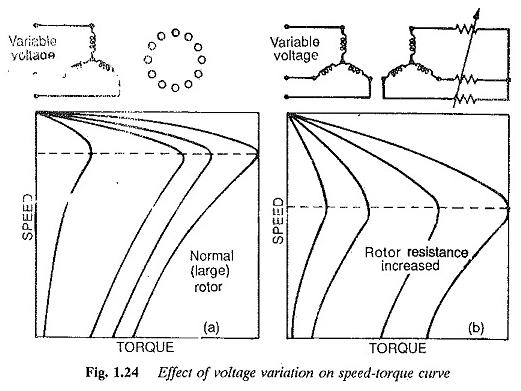
Rysunek 1.24 (b) pokazuje zalety wysokiej rezystancji w wirniku, gdy zastosowane napięcie jest zróżnicowane w celu zmodyfikowania charakterystyki prędkości prędkości.
Oprócz zwiększenia zakresu kontroli prędkości prąd narysowany przez silnik o niskim napięciu może być ograniczony przez odpowiedni wybór oporu wirnika.
Zmiana bieguna w silniku indukcyjnym:
Krzywa prędkości prędkości silnika indukcyjnego można zmodyfikować przez ponownie połączone uzwojenie wzmacniające, aby dać różne zestawy biegunowe. Gdy liczba zmieniających się słupów w silniku indukcyjnym, to samo dotyczy prędkości.
Rodzaj połączenia decyduje o obciążeniu upoważnionym do stałego momentu obrotowego lub stałej mocy. Ta metoda zmiany słupka w silniku indukcyjnym jest odpowiednia dla silników klatkowych wiewiórki, ponieważ ich wirniki mogą przyjąć pewną liczbę biegunów. Nie jest wymagane ponowne połączenie uzwojenia wirnika.
Jeśli z drugiej strony zastosowano wirnik pierścienia przesuwnego, należy go ponownie połączyć z różnymi zestawami biegunów. Powstałe uzwojenie słupkowe jest używane do ponownego połączenia. Krok cewki zmienia się skutecznie przy różnych prędkościach.
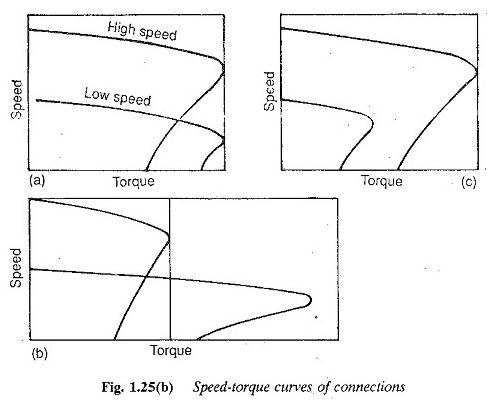
Każda faza ma uzwojenie podzielone na połówki. Są one połączone szeregowo lub równolegle, aby skutecznie zmodyfikować liczbę biegunów. Możliwe kombinacje są reprezentowane na rysunku 1.25.
Stałe funkcjonowanie mocy jest zapewniane przez połączenie serii-Delta dla dużych prędkości i gwiazdę równoległej dla niskich prędkości. Przy dużych prędkościach rozwinę się słaby moment obrotowy, aby moc była stała. Napięcie na połowę wynosi V / 2 w połączeniu z dużą prędkością i V / √3 przy niskiej prędkości.
Połączenia równoległe i serie serii dla dużych prędkości dla wysokich i niskich prędkości
Odzyskiwanie mocy przesuwnej silnika indukcyjnego:
Modyfikacja charakterystyki linii prędkości przy użyciu zmiennego oporu wirnika stanowi główną wadę słabej wydajności, co czyni ją opłacalną. Działanie przy niskiej prędkości nie jest możliwe z powodu przegrzania wirnika.
Te niskie prędkości można uzyskać bardzo skutecznie z rozsądną wydajnością przy użyciu wzorców odzyskiwania energii. Moc przesuwna marnowana w oporności zewnętrznej w obwodzie wirnika jest zwracana do sektora tych schematów.
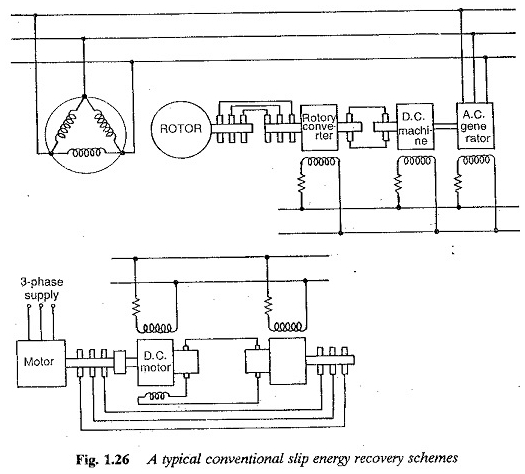
Konwencjonalne metody odzyskiwania mocy przesuwnej wykorzystują obracające się maszyny, takie jak konwertery obrotowe, alternatory, maszyny DC itp. W obwodzie wirnika w celu konwersji zasilania na częstotliwość mocy w zasilaniu na częstotliwość linii. Niektóre typowe konwencjonalne wzorce, zwane kontrolami Scherbiusa i Kramera, przedstawiono na rysunku 1.26.

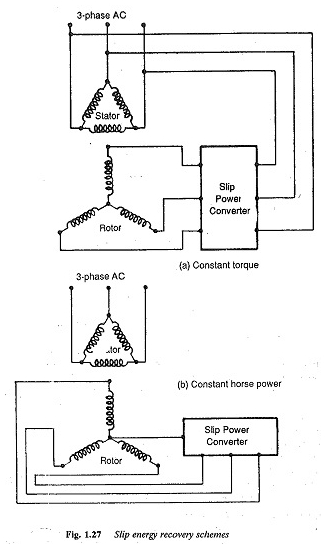
Po zastosowaniu tych metod silnik / NO musi działać, aby trenować zarówno stały moment obrotowy, jak i stałe ładunki mocy. Zasadniczo ilustrują one na rycinie 1.27 (a) i (b). Na rysunku.
1.27 (a) Moc wirnika przy częstotliwości przesuwanej jest przekształcana w częstotliwość linii za pomocą przesuwanego konwertera. Jeśli przesuwany konwerter mocy umożliwia przepływ mocy w obu kierunkach, silnik może być używany zarówno w prędkościach podwodnych, jak i super synchronicznych.
Ten schemat służy do powodowania stałego obciążeń momentu obrotowego. W operacji podsynchronicznej moc przesuwna jest przekształcana w częstotliwość linii i dostarczana do sektora. Podczas operacji supersynchronicznej moc na częstotliwości linii jest przekształcana w zasilanie ślizgowe i dostarczana do silnika.
Ważną cechą tej modyfikacji jest to, że rozwinięty moment obrotowy jest proporcjonalny do prądu wirnika pod hipotezą stałego przepływu w silniku. Krzywe momentu obrotowego prędkości dla tego schematu przedstawiono na rysunku 1.28 (a).
Pożądana modyfikacja krzywych prędkości momentu pokazanego na rysunku 1.28 (a) uzyskuje się przez kontrolowanie przesuwnego przemiennika mocy, aby odpowiadała napięciu silnika z danym przesunięciem. Kontrola konwertera jest reprezentowana przez parametr A.
Wzrost wzrostu napięcia po stronie wirnika przesuwnego przetwornika mocy powodującą spadek prędkości. W maju ustalony na warunki próżniowe, ustalone w pustej wartości, silnik ma charakterystykę spadającej prędkości.
Na przykład A może być kątem strzelania konwertera po stronie linii w przypadku statycznych schematów mocy przesuwnej.
Ilustrowany schemat na rysunku 1.27 (b) wykorzystuje moc przesuwną do napędzania maszyny pomocniczej. W takim przypadku przesuwny konwerter mocy jest połączony z wirnikiem silnika indukcyjnego i pobiera moc. Tutaj również możliwe są prędkości sub i super synchroniczne.
Podczas operacji podsynchronicznej maszyna pomocnicza przekształca moc przesuwną w moc mechaniczną. Podczas operacji supersynchronicznej dodatkowa moc jest napędzana uzwojeniami wirnika przez przesuwany konwerter maszyny pomocniczej. Połączenie utrzymuje stałą moc.
Charakterystyka prędkości momentu obrotowego silnika indukcyjnego przedstawiono na rysunku 1.28 (b). Również tutaj A jest parametrem wybranego przesuwnego konwertera w celu wywołania kontroli prędkości, jak opisano powyżej, gdy jest on zróżnicowany w określony sposób. Moc przesuwną jest zarządzana przez główny wał silnikowy. Moment obrotowy maleje wraz ze wzrostem prędkości.
W przypadku dostępności konwerterów mocy tyrystorowej, kaskady statycznych konwertera (falownik prostownika) są stosowane w obwodach wirnika silników indukcyjnych w celu uzyskania wyżej wymienionych modyfikacji do charakterystycznej prędkości momentu obrotowego. Schematy przedstawiono na rysunku 1.29 (a).
Moc przesuwna jest naprawiona i dostarczana do wspólnego konwertera linii, która zasila moc w kierunku sektora. Krzywe prędkości uzyskane przez zmianę kąta falownika fotografowania przedstawiono na rysunku 1.29 (6). W obwodzie wirnika można również użyć cyklokonwerteru.
Wstrzyknięcie napięcia w obwodzie wirnika:
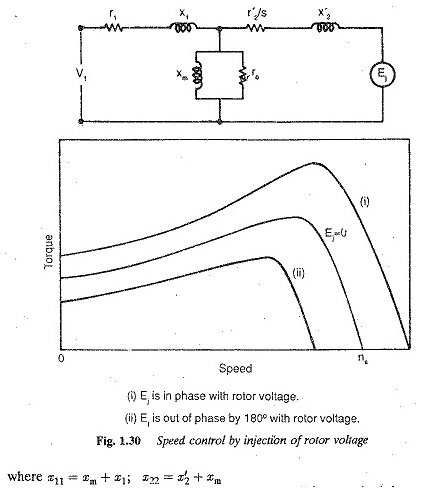
Charakterystykę momentu obrotowego silnika indukcyjnego można zmodyfikować poprzez wstrzyknięcie napięcia do obwodu wirnika (wirnik ran) silnika indukcyjnego. Wstrzyknięte napięcie powinno być na częstotliwości poślizgu.
Jeśli wstrzyknięte napięcie jest przeciwne napięciem wirnika, efektywny prąd wirnika maleje, co natychmiast wpływa na moment obrotowy. Zmniejszona para nie może napędzać obciążenia.
Prędkość wirnika zmniejsza się do wartości, która zapewnia wystarczające indukowane napięcie wirnika, a zatem prąd wirnika powoduje obciążenie. Jeśli z drugiej strony wstrzyknięcie napięcia pomaga napięciem wirnika, prowadzi do wzrostu prądu wirnika.
Wzrost rozwiniętego momentu obrotowego przyspiesza wirnik z prędkością, przy której przepływa wystarczający prąd wirnika, aby spowodować obciążenie. Krzywe momentu obrotowego prędkości dla obu przypadków przedstawiono na rysunku 1.30.
Dla porównania wskazywana jest również krzywa prędkości momentu obrotowego krótkiego wirnika w obwodzie z zerowym wstrzykniętym napięciem. Zgodnie z liczbami można wywnioskować, że możliwe jest zmodyfikowanie pojemności momentu obrotowego silnika poprzez modyfikację wstrzykniętego napięcia.
Gdy wstrzyknięte napięcie przeciwstawia się pojemność momentu obrotowego wirnika, podczas gdy wzrasta, gdy wstrzyknięte napięcie ułatwia napięcie wirnika.
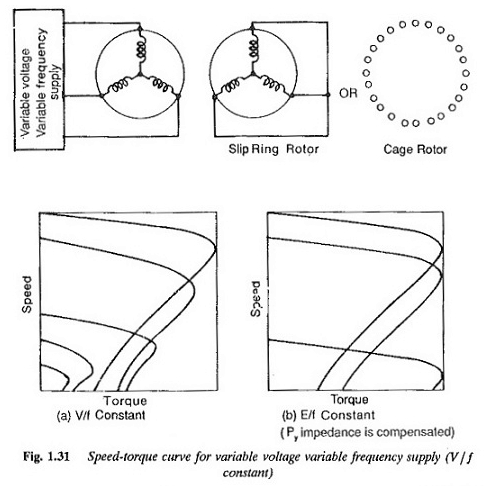
Zmienność częstotliwości mocy:
Prędkość synchronicznego pola magnetycznego zależy od częstotliwości mocy. W konsekwencji, zmieniając częstotliwość mocy, prędkość synchroniczną, a zatem prędkość wirnika może być zróżnicowana.
Aby uniknąć nasycenia ze względu na wzrost przepływu o niskiej częstotliwości, napięcie przyłożone do silnika jest również zróżnicowane, tak że przepływ pozostaje stały przy jego wartości nominalnej na wszystkich częstotliwościach.
Aby to osiągnąć, prostą metodą jest zmienianie zarówno napięcia, jak i częstotliwości, aby V / F było stałe. Krzywe prędkości momentu obrotowego ze stałą V / F przedstawiono na rysunku 1.31.
Istnieje niska częstotliwość wyczerpania momentu obrotowego. Silnik ma zmniejszoną pojemność momentu obrotowego i pojemność przeciążenia. Wynika to z dominującego wpływu oporu stojana na niskie częstotliwości.


Spadek oporu staje się znaczący w porównaniu z zastosowanym napięciem. Powoduje to wyczerpanie przepływu, którego spójność nie może być utrzymywana z niską częstotliwością. Para opracowana ze stałą V / F jest
Aby mieć tę samą parę i tę samą pojemność przeciążenia na wszystkich częstotliwościach, konieczne jest zrekompensowanie upadku stojana (oporności), aby utrzymać stałą E / F. V / F nie jest już stałe, ponieważ rośnie wraz ze spadkiem częstotliwości. Para opracowana w tym przypadku jest podana przez

Lub
L ′ 2σ jest indukcyjnością wycieków wirnika.
Krzywe prędkości momentu obrotowego dla stałej E / F przedstawiono na rysunku 1.31 (b).
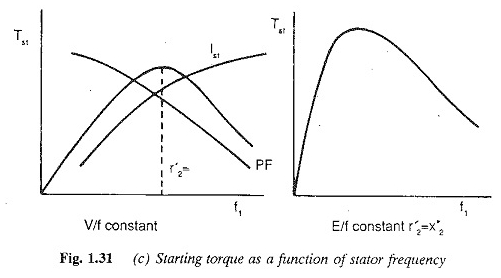
Przy kontroli V / F (stałej) moment początkowy wzrasta wraz ze spadkiem częstotliwości, do określonej wartości. Poniżej tej wartości częstotliwości zmniejsza się moment obrotowy początkowy. Efekt ten jest uważany za podobny do realizacji poprzez modyfikację reaktancji wycieków wirnika.
Wraz ze spadkiem częstotliwości reaktancja wycieków wirnika. Wraz ze spadkiem częstotliwości reaktancja wycieków wirnika maleje. Rzeczywiście, następuje wzrost wirnika w porównaniu z reaktancją wycieków.
W konsekwencji moment początkowy wzrasta do pewnej częstotliwości, gdzie reaktancja wycieków wirnika jest równa odporności na wirnik.
Jeśli częstotliwość jest zmniejszona, początkowy moment obrotowy maleje. Zmienność początkowego momentu obrotowego z częstotliwością pokazano na rycinie 1.31 (c). Jednak przy stałej kontroli E / F moment początkowy wzrasta wraz ze wzrostem częstotliwości do wartości ustalonej przez parametry.
Jeśli częstotliwość nadal spadnie, moment początkowy maleje. Przyspieszenie można uzyskać ze stałego momentu obrotowego i prądu zbrojenia poprzez zmianę częstotliwości stojana od niskiej wartości poprzez utrzymanie stałej E / F.
Charakterystyka prędkości momentu obrotowego silnika indukcyjnego uzyskuje się poprzez zwiększenie częstotliwości zasilania poza wartość nominalną. Przepływ silnika maleje, ponieważ napięcia nie można zwiększyć poza wartość nominalną. Silnik działa w przepływie przepływu.
Krzywe prędkości momentu obrotowego są równoległe do siebie na wszystkich częstotliwościach, rozciągają się na drugą kwadrancję, pokazując, że możliwa jest regeneracja.
Uruchamianie silnika można łatwo osiągnąć za pomocą zmiennego napięcia, zmiennego zasilania częstotliwości. Zmniejsza to prąd początkowy, co daje parę rozsądnie przyspieszającą dobrym współczynniku mocy, nawet z silnikami klatkowymi o niskim oporze.
Kontrola prędkości silnika indukcyjnego:
Trzy -fazowy silnik indukcyjny jest zasadniczo silnikiem o stałej prędkości. Nie można uzyskać płynnej kontroli prędkości silnika w szerokim zakresie, gdy jest dostarczany z konwencjonalnego napięcia o stałym stopniu trzech faz, o stałej częstotliwości.
Konwertera mocy Thyristor umożliwiły zmienną częstotliwość i zmienne dostawy napięcia. Służą one do uzyskania płynnej kontroli prędkości silników indukcyjnych w szerokim zakresie.
Metody modyfikacji charakterystyki prędkości momentu omówionego silnika indukcyjnego są również mniej więcej metodami sterowania. Na przykład konwertera mocy tyrystoru są szeroko stosowane do przyjęcia metod kontroli prędkości
Helikopter do sterowania rezystancją wirnika, kontroler napięcia prądu przemiennego w celu zmiany napięcia zasilania, kaskady konwertera statycznego do odzyskiwania energii ślizgowej itp.