Charakterystyka silnika indukcyjnego z trzema fazą:
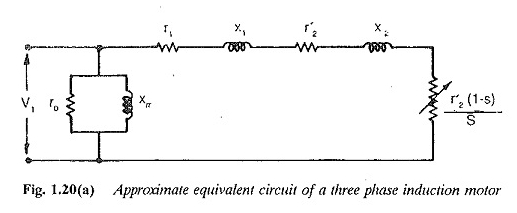
Charakterystykę wydajności trzy -fazowego silnika indukcyjnego można wyprowadzić przy użyciu przybliżonego równoważnego obwodu zilustrowanego na rysunku 1.20 (a). W obwodzie

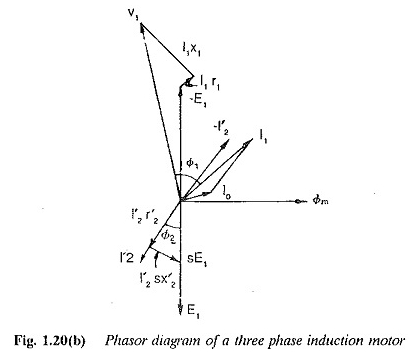
Schemat fazy silnika pokazano na rycinie 1.20 (b).
W silniku indukcyjnym moc przeniesiona do wirnika (PD) utrata miedzi wirnika (PCU2) i opracowanej mocy mechanicznej (PM) są w stosunku 1: S: (1 – s). Moment obrotowy opracowany przez silnik

Ale stosując relacje PM = PD (LS) i NR = NS (LS), mamy
![]()
Więcej w użyciu głębokości 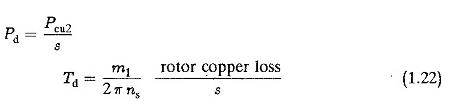
Równoważnego obwodu

Dlatego opracowana para

Bardzo małe majtki (region obsługi silnika)
i R’2 / s≫r1 prowadzące do

To pokazuje, że rozwinięty moment obrotowy jest bezpośrednio proporcjonalny do zmiany. W ten sam sposób, przy znacznych przesunięciach, para zmienia się w przeciwnym proporcji wraz ze zmianą. W zmianach pośrednich rozwinięta para musi zostać obliczona. Charakterystyka momentu obrotowego prędkości (ślizganie się) przedstawiono na rysunku 1.21.
Z charakterystycznego trendu widzimy, że moment ma maksymalną wartość. Przesunięcie, w którym wykonywany jest ten maksymalny moment obrotowy

Maksymalny moment obrotowy to

Czasami impedancja stojana jest zaniedbywana lub spadek impedancji stojana jest przesunięty do obsługi silnika do stałego przepływu do wszystkich szkiełek. Zastosowane napięcie zostało zwiększone, aby napięcie indukowane. E1 / F jest stały (równy wartości przy napięciu nominalnym).
Zastosowane napięcie zmienia się w zależności od częstotliwości, takiej jak E1 / F, pozostaje stała. Impedancję stojana można założyć, że wynosi zero, ponieważ nie ma ono efektu. W takim przypadku są relacje


„Kluczowa krzywa prędkości dla tego przypadku jest również przedstawiona na rysunku 1.21.
Zwróć uwagę na następujące cechy typowej krzywej prędkości prędkości (ryc. 1.21):
- Przy dokładnie synchronicznej prędkości s = 0 rozwinięty moment obrotowy wynosi zero (td = 0). Można tego oczekiwać, ponieważ nie ma prądów indukowanych z powodu zerowej prędkości względnej.
- Pełna para odpowiada zmianie nominalnej.
- TDM to maksymalny moment obrotowy na poślizgu SM (T)
- TST jest momentem początkowym przy S = 1.
Para opracowana przy każdym poślizgu wyrażonym w maksymalnym ułamku momentu obrotowego jest podana przez

gdzie a = r1 / r′2. Gdy odporność stojana R1 jest zaniedbywana

Działanie silnika w zakresie przesuwanego 0 – SM jest stabilne. Gdy silnik działa na tej plaży, każde zakłócenia w punkcie roboczym przez zmieniającą się prędkość lub moment obrotowy jest amortyzowany, a silnik powraca do pierwotnego punktu roboczego lub osiąga nowy. W celu stabilnego działania rozwinięty moment obrotowy musi wzrosnąć, gdy prędkość spadnie, to znaczy,
Działanie silnika w SM Beach. do / jest niestabilne. Na tej plaży krzywa ma dodatnie DTD / DNS, to znaczy, że moment obrotowy maleje, gdy prędkość spadnie.
Charakterystyka jest prawie liniowa z bardzo małymi szkiełkami (w stabilnym regionie roboczym). Ta liniowość trwa do punktu momentu pęknięcia dla obudowy roboczego o stałym przepływie. Ilustrowane cechy na rycinie 1.21 są przeprojektowane na tej samej rysunku.
W przypadku przesunięć jednostki operacja znajduje się w czwartym kwadrancie. Obrót wirnika i obrotowego pola magnetycznego znajdują się w przeciwnym kierunku. Rozwinięty moment obrotowy jest momentem hamującym, który próbuje zatrzymać silnik. Może się to zdarzyć na dwa sposoby:
- Sekwencja fazowa zaopatrzenia silnika jest odwrócona podczas wyścigu.
- Negatywny moment obrotowy jest nakładany do drzewa.
Silnik działa jak hamulec w zakresie przesuwanego (s> 1), aby napędzać obciążenie ze stałą prędkością podczas opuszczania obciążenia. Para jest pozytywna, podczas gdy kierunek obrotu jest odwrócony.
Dzięki odpowiedniej rezystancji wirnika punkt roboczy jest przenoszony do ćwiartki operacyjnej, tak aby obciążenie jest obniżane ze stałą prędkością.
Krzywa prędkości momentu obrotowego rozciąga się na drugą kwadrancję, reprezentując ujemny moment obrotowy w kierunku przed obrotem. Dzieje się tak, jeśli prędkość

Rotor jest wyższy niż prędkość synchroniczna. Każdy trend wirnika do przyspieszenia poza prędkością synchroniczną jest zatrzymywany przez moment obrotowy generacji. W tym trybie pracy cała energia kinetyczna podłączona do wzrostu prędkości jest zwracana do sektora. Maksymalny moment obrotowy (rozkład) zależy od następujących:
- Zmienia się, gdy kwadrat zastosowanego napięcia.
- Zmniejsza się wraz z impedancją stojana.
- Jego wartość jest niezależna od oporu wirnika.
- Jego wartość maleje wraz ze wzrostem reaktancji wycieków wirnika.