Dynamiczny modelowanie silnika indukcyjnego:
Zasadniczo stała mechaniczna dla dowolnej maszyny jest znacznie większa niż stała czasowa elektryczna. W związku z tym dynamiczne modelowanie silnika indukcyjnego można uprościć, zaniedbując elektryczną przejściową bez utraty precyzji wyników.
Model obwodu silnika indukcyjnego jest przeznaczony do ciągłego przesuwania się, ale miałby również zastosowanie o przesuwanie powoli zmieniające się, jak to zwykle bywa na początku silnika.
Rycina 9.64 pokazuje typową charakterystykę ślizgania się momentu ślizgowego (prędkość) dynamicznego modelowania silnika indukcyjnego, a także moment obciążenia w funkcji ślizgania się (prędkości).
Każdy punkt na charakterystyce (TL-S) reprezentuje moment obrotowy (tarcia) wymagany przez obciążenie i silnik, gdy działają z regularną prędkością. Silnik uruchomi się tylko wtedy, gdy t> tl i osiągnie regularną prędkość roboczą ω0, która odpowiada t = tl, to znaczy
Punkt przecięcia P dwóch charakterystyk prędkości momentu obrotowego. Można to zweryfikować metodą zaburzeń, że P jest stabilnym punktem pracy dla charakterystyki wskazanej prędkości ładowania.
Jeśli z jakiegokolwiek powodu prędkość staje się większa niż ω0, (t – tl) <0, kombinacja obciążenia maszynowego zwalnia i wraca do punktu roboczego. Przeciwnie występuje, jeśli prędkość spadnie poniżej ω0.

W okresie przyspieszenia

gdzie j = połączona bezwładność silnika i obciążenia. TERAZ

Dlatego równ. (9.87) zmodyfikowany do

Integracja

Ponieważ termin 1 / (t – tl) jest nieliniowy, integracja z równaniem. (9.89) należy wykonać graficznie (lub cyfrowo), jak pokazano na rysunku 9.65 dla przypadku, gdy S1 = 1 i S2 = S0.
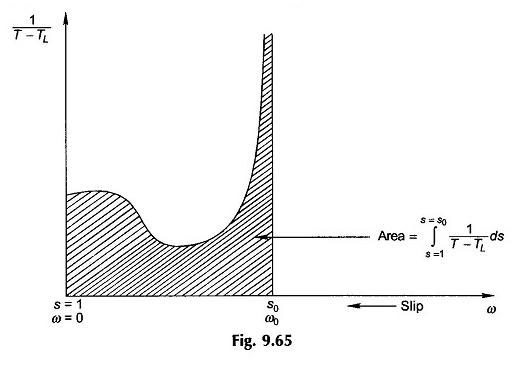
Ponieważ 1 / (tl) staje się ∞ do S0, praktyczna integracja jest przeprowadzana tylko do 90 lub 95% S0 w zależności od pożądanej precyzji.
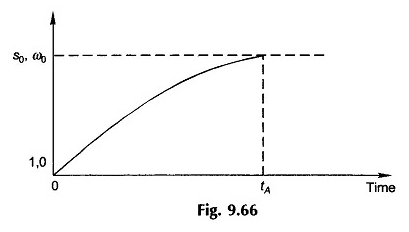
Rysunek 9.66 pokazuje, jak przesuwanie (prędkość) zmieniają się w czasie w okresie przyspieszenia, osiągając regularną wartość S0 (ω0) w czasie, czas przyspieszenia. Ze względu na brak linii (t – tl) w funkcji przesunięcia krzywa przesuwna (prędkość) na rysunku 9.66 nie jest wykładnicza.
Zaczynając bez obciążenia (tl = 0):
W tym konkretnym przypadku zakłada się, że maszyna i moment obrotowy tarcia ładowania tl = 0.
Zakładając, że straty stojana są znikome (tj. R1 = 0), moment obrotowy silnika uzyskany z równania. (9.22) jest


Również równania. (9.24)


do zmiany (równ. (9.23))


Z równań (9.90) i (9,91),
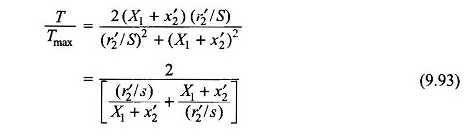
Zastępując równanie. (9,92) w (9.93)

Ponieważ zakłada się, że TL wynosi zero, sam moment obrotowy silnika jest przyspieszonym momentem obrotowym,
To jest powiedział

Ti do przełączania z przesunięcia S1 na S2 jest uzyskiwane podczas integracji równania. (9.95) as
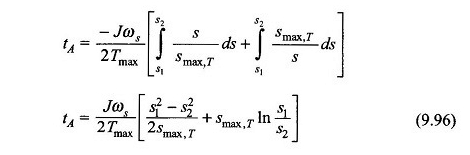
Czas przyspieszenia, aby maszyna osiągnęła regularny początek start -up, można obliczyć na podstawie równania. (9,96) Z S1 = 1 i S2 = s, to znaczy

Optymalny smax, t dla minimalnego czasu przyspieszenia:
Aby znaleźć optymalną wartość SMAX, t dla dynamicznego modelowania silnika indukcyjnego, aby mieć minimalny czas przyspieszenia, aby osiągnąć S2 z S1, równ. (9.96) należy odróżnić od SMAX, T i asymilowane od zera. Daje

Dla minimalnego czasu przyspieszenia maszyny do osiągnięcia dowolnego poślizgu od samego początku, optymalna wartość SMAX, T jest podana przez równanie. (9,98) z S1 = 1 i S2 = S. SO

I

Ponadto, aby umożliwić nam obliczenie optymalnej wartości rezystancji wirnika w celu przyspieszenia maszyny do przesuwania S2 z S1, równ. (9.98) zastępuje się w równaniu. (9.92) Daj
