Kwadratowe źródło źródła napięcia falownika odżywionego w indukcji silnika:
Czytnik silnika indukcyjnego odżywiony falownikiem fali kwadratowej jest rodzaj konwertera wiązań CC, który jest urządzeniem do konwersji dwóch stóp. Dieta trójfazowa jest najpierw naprawiana za pomocą prostownika z boku linii.
Prosty CC jest odwrócone w AC pożądanej częstotliwości przez falownik z boku obciążenia, jak pokazano na rysunku 4.22. Gdy obciążenie nie może zapewnić mocy reaktywnej wymaganej dla falownika, falownik musi być koniecznie powszechną siłą.
Indukcja w obwodzie łącza CC zapewnia wygładzanie, podczas gdy pojemność utrzymuje spójność napięcia wiązania. Napięcie łącznika jest kontrolowaną cechą.
Natychmiastowe napięcie na zaciskach maszyny (na zaciskach wyjściowych falownika) jest w dowolnym momencie wprost proporcjonalnym do napięcia połączenia CC (zasilacz CC, który ma niską impedancję wewnętrzną), a prąd maszyny (wyjściowy) jest funkcją spożycia obciążenia.
W związku z tym idealne obciążenie silnika indukcyjnego zasilanego falownikiem źródła fali kwadratowej, biorąc pod uwagę harmoniczne w prądu ładowania, powinno być bardzo indukcyjne i mieć niski współczynnik mocy.

Dzięki odpowiedniemu przełączaniu tyrystorów falownika napięcie łącza CC jest pod wrażeniem na przemian faz silnika indukcyjnego. Forma fali napięcia na zaciskach wyjściowych zależy tylko od tego przełączania i przewodzenia tyrystorów.
Jeśli tyrystory prowadzą 180 ° w okresie, napięcie wyjściowe ma postać fali kwadratowej. W takim przypadku kontrola napięcia jest uzyskiwana za pomocą kontrolowanego prostownika w fazie z boku linii.
Napięcie łącza CC jest zmienne, a forma fali napięcia wyjściowego pozostaje taka sama na wszystkich obciążeniach i częstotliwościach. Falownik nazywa się również falownikiem fali kwadratowej, ponieważ napięcie wyjściowe jest falą kwadratową.
Te falowniki mają problemy z przełączaniem przy bardzo niskich częstotliwościach, ponieważ wiązanie DC dostępne przy tych częstotliwościach nie może wystarczająco ładować kondensatorów komunikacyjnych w celu komunikowania tyrystorów. To stawia limit niższej częstotliwości roboczej.
Aby rozszerzyć częstotliwość na zero, należy zastosować specjalne obwody obciążenia. Zakres kontroli prędkości falownika fali kwadratowej w falowniku odżywionym z indukcją działającą na falowniku fali kwadratowej wynosi 1: 20.
Nie można zmodyfikować polaryzacji napięcia łącza CC. W związku z tym podczas regeneracji bieżący kierunek w obwodzie połączenia musi zostać odwrócony. Oddzielna konwerter fazowy jest wymagany z boku linii do regeneracji, jak pokazano na rysunku 4.22.
Dynamiczne hamowanie może być używane przy użyciu rezystorów przełączanych. System dynamiczny systemu nie jest zbyt dobry na niskich częstotliwościach.
Możliwe jest początek słodkiego silnika. Maszyna działająca na zmiennej częstotliwości, zmienne konwerter napięcia nie wymaga dodatkowego sprzętu początkowego.
Maszyna działa normalnie na liniowej części krzywej prędkości momentu obrotowego i nie widzi momentu obrotowego i zablokowanego prądu wirnika w jego odjeździe. Maszyna ma identyczne cechy punktu synchronicznego w maksymalnym punkcie momentu obrotowego, przy każdej częstotliwości.
Moment i prąd maszyny mogą być utrzymywane na tej plaży, zmieniając częstotliwość i napięcie jednocześnie i delikatnie do stałego momentu obrotowego i prądu przy wymaganej prędkości, zmieniając częstotliwość stojana i zachowując częstotliwość stałego wirnika.
Przyspieszenie jest w trybie stałym kontrolowanym przepływem. Tryb, w którym przesunięcie jest utrzymywane na stałym poziomie, a przepływ jest kontrolowany (tryb stałego przepływu przesuwania) jest również możliwy do celów początkowych. Metody te zwiększają skuteczność czytelnika.
Gdy przesunięcie jest używane jako kontrolowana ilość w celu utrzymania stałej przepływu w silniku, czytnik nazywa się czytnikiem przesuwanego.
Wykonując przesuwane ujemne (tj. Zmniejszając częstotliwość wyjściową falownika), maszynę można zaprojektować do działania jako generator, a energia części obrotowych wzrosła do dodatkowego konwertera linii lub rozproszona w oporności do hamowania dynamicznego.
Utrzymanie stałej częstotliwości ślizgowej (lub przesuwanej kontroli), można przeprowadzić hamowanie do stałego momentu obrotowego i prądu. Zatem hamowanie jest również szybkie.
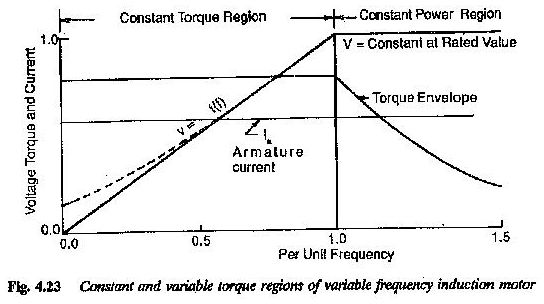
Ponieważ napięcie może być zróżnicowane w celu utrzymania stałego przepływu, możliwe jest ciągłe działanie momentu obrotowego do częstotliwości nominalnej. Oprócz częstotliwości nominalnej napięcie pozostaje według wartości nominalnej, a maszyna działa w trybie przepływu.
Silnik daje stałą moc wyjściową dla wszystkich prędkości i nazywa się trybem stałej mocy koni. Tryby te są reprezentowane na rysunku 4.23.
Silnik otrzymuje napięcia fali kwadratowej. To napięcie ma elementy harmoniczne. Powstały prąd zbrojenia jest nieinusoidalny, ma szczyty. Te szczyty faktycznie decydują o ocenach projektowania falownika. Harmoniczne prądu stojana powodują dodatkowe straty i ogrzewanie.
Dlatego silnik wymaga zwężenia lub dla danej mocy danego konia, należy zastosować duży silnik.
Te harmoniczne są również odpowiedzialne za impulsy momentu obrotowego. Reakcja piątej i siódmej harmonicznej z fundamentalnym rodzeniem szóstej harmonicznej opracowanej przez pary.
W przypadku falownika źródła fali kwadratowej fali podawanej do odżywanego silnika indukcyjnego z falownika fali kwadratowej, zawartość harmoniczna prądu pozostaje stała niezależna od częstotliwości wejściowej, na plaży częstotliwości roboczej falownika.
Na prądy szczytowe i harmoniczne linii, a także prąd stojany wpływa reaktancja wycieków silnika. Reaktancja wycieków jest wysoka mniejsza zawartość harmoniczna i maksymalna wartość prądu stojana.
Konieczne jest zatem wybrać silnik indukcyjny z dużą reaktancją upływu do pracy w silniku indukcyjnym zasilanym kwadratowym źródłem fali kwadratowej. Ponieważ prądy zaawansowane są niższe, ocena projektowania falownika zmniejsza się. Kontrola otwartej pętli jest możliwa, ale może mieć problemy ze stabilnością o niskiej prędkości.
Możliwe jest działanie multimotorowe, a przełączanie jest niezależne od obciążenia. Konwerter reprezentuje źródło, a silnik można podłączyć. W konsekwencji nie jest konieczna korespondencja między konwerterem a obciążeniem.
Jako jazda do zjeżdżania silnik Fed VSI ma następujące dodatkowe cechy:
Kontrola przepływu pośredniego można uzyskać za pomocą kontroli ślizgowej. Ponieważ ilość równowagi jest określona pod kontrolą, zachowanie dynamiczne może nie być zadowalające. Możliwe jest precyzyjna kontrola momentu obrotowego w szerokim zakresie prędkości (czasami po zatrzymaniu).
Jest to bardzo skuteczny czytelnik, który ma bardzo dobry współczynnik wydajności i mocy, gdy częstotliwość przesuwna jest ograniczona do liniowej części krzywej prędkości momentu obrotowego.
Nie jest wymagane urządzenie początkowe i możliwe jest bardzo szybkie przyspieszenie dla stałego momentu obrotowego i prądu. Regeneracja lub hamowanie dynamiczne jest również możliwe dla stałego momentu obrotowego i prądu. Możliwe są czterech czytelników kwadrantu.
Kontrola częstotliwości pętli zamkniętej zapewnia zmienną prędkość prędkości charakterystykę silnika CC w systemie Ward Leonard.
Charakterystykę silnika indukcyjnego odżywanego do falownika źródła fali kwadratowej można podsumować w następujący sposób:
1. Landery wywarły wrażenie na ciągłym napięciu prądu o zmiennej amplitudzie.
2. nawet dla odtwarzacza multimotorowego.
3. Kolejność jest niezależna od obciążenia. Konwerter i obciążenie nie muszą być konwerter reprezentuje źródło, do którego można podłączyć silnik.
4. Ta obecna częstotliwości wyjściowe konwertera do 1500 Hz są możliwe. Ten dysk jest bardzo odpowiedni do (silników) operacji o wysokiej prędkości. Dysk są dostępne do notacji 200 kVA.
5. Najniższa częstotliwość robocza ograniczona przez przełączanie wynosi około 5 Hz. Zakres prędkości wynosi 1: 20.
6. Nie dostosowane do przyspieszenia po obciążeniu i nagłe zmiany obciążenia.
7. Dynamiczne zachowanie jest całkiem dobre przy dużej prędkości.
8. Dynamiczne hamowanie jest możliwe. Regeneracja (cztery operacje kwadrantu) wymaga dodatkowego połączonego – przeciwrównoległego konwertera z bokiem linii. Odwrócenie prędkości uzyskuje się poprzez modyfikację sekwencji fazowej.
9. Napięcie wejściowe silnika jest nie -sinusoidalne. Powoduje to dodatkowe straty, ogrzewanie i impulsy momentu obrotowego.
10. Motor musi mieć indukcyjność wycieków wystarczająco dużych, aby ograniczyć prądy zaawansowane i zmniejszyć zawartość harmoniczną THP.
11. Kontrola otwieracza silnika jest możliwa, ale może mieć problem z niską prędkością.
12. Współczynnik mocy linii jest słaby ze względu na kontrolę fazową.
13. może być obsługiwane jako przesuwany czytnik kontrolowany.
14. Uważa, że aplikacja jest szkoleniem przemysłowym do ogólnego użytku dla niskiej do średniej mocy.