Bez elektryki od silników indukcyjnych polifazy:
Hamowanie elektryczne silników indukcyjnych polifazy, które składają się z różnych typów, a mianowicie,
- Rozgałęzienie (lub hamowanie przeciwprądowe)
- Dynamiczne (lub reostatyczne) hamowanie
- Hamowanie regeneracyjne
1. Rozgałęzienie (lub hamowanie fali)
Wtyczkę można wykonać w silniku indukcyjnym, po prostu odwracając dwie z trzech faz, które powodują kierunek obrotowego pola magnetycznego.
Podczas zmiany silnika na położenie wtyczki silnik działa w kierunku przeciwnym do pola, a prędkość względna wynosi około dwa razy [(2 – s) czasów synchronicznej prędkości, to znaczy przesunięcie jest bardzo równe dwóch, równa (2 – s).
Napięcie indukowane w wirniku będzie zatem dwukrotnie dwukrotnie indukowane na zatrzymaniu, a uzwojenie musi być dostarczane z dodatkową izolacją, aby wytrzymać to duże napięcie.
W okresie połączenia silnik działa jak hamulec i pochłania energię kinetyczną zawsze obracającego się obciążenia, powodując spadek prędkości. Powiązana moc PMECH jest rozpraszana w postaci ciepła w silniku.
Jednocześnie wirnik nadal pobiera moc z stojana, który jest również rozpraszany w postaci ciepła. Ze względu na wzrost częstotliwości wirnika występują dodatkowe straty żelaza w wirniku.
Zatem ciepło rozwinięte w wirniku w okresie hamowania jest około trzykrotnie niż ciepło rozwinięte w okresie początkowym (lub w stanie zablokowanego wirnika).
Rozmiar silnika indukcyjnego, w którym należy zastosować wtyczkę, jest zatem rozstrzygany nie poprzez ładowanie warunków, ale także przez stan hamowania.
W przypadku silnika klatki wiewiórki energia jest całkowicie rozpraszana w maszynie; Podczas gdy w przypadku silnika wirnika rannego energia ta jest również rozpraszana w oporności zewnętrznej dodanej w tym celu w obwodzie wirnika.
Warunki hamowania elektrycznego silników indukcyjnych polifazy można zbadać, biorąc pod uwagę krzywe krzywe silnika silnika, gdy są one wydłużone poza punkt 100%, jak pokazano na rysunku 1.103 (a).
Orderinian w punkcie B reprezentuje moment obrotowy w momencie wtyczki i widzimy, że moment obrotowy stopniowo rośnie, gdy silnik zbliża się do zatrzymania, po czym oczywiście, jeśli linia zasilania nie zostanie odłączona, ponownie połączy się ponownie w przeciwnym kierunku zgodnie z zwykłą prędkością momentu obrotowego krzywy zakrętów od A.
W związku z tym widzimy, że aby przywrócić silnik, konieczne jest odłączenie zasilania silnikowi z zerową prędkością.

Z krzywych przesuwnych momentu obrotowego pokazane na rycinie 1.103 (a) obserwuje się, że zakres momentu hamowania jest bardzo niski w porównaniu z maksymalnym momentem obrotowym wywieranym przez silnik. Dotyczy to szczególnie niskiej odporności wirnika.
W miarę wkładania coraz większej oporu do obwodu wirnika, maksymalny moment obrotowy występuje przy rosnących wartościach.
To jest powód, dla którego silniki indukcyjne klatki wiewiórki, które są zaprojektowane głównie pod kątem maksymalnej wydajności, a zatem dla niskiego oporu nie są odpowiednie dla tego rodzaju hamowania.
W przypadku napędów obrotowych ran dodanie odporności w obwodzie wirnika powoduje coraz większy moment obrotowy hamowania, a zatem sterowniki wirnika ran są bardziej odpowiednie dla wtyczki.
Jeśli zmiana oporu wirnika zostanie dostosowana do dostosowania, że maksymalny moment hamowania jest wykonywany wszędzie, optymalne hamowanie zostanie co najmniej osiągnięte

Ekspresja momentu hamowania zaniedbywającego impedancję stojana i reaktancję magnesującą można wywnioskować i podać jako podawanie jako

Prąd wirnika można określić w okresie hamowania na podstawie następującej relacji i jest prześledzony, jak pokazano na rysunku 1.103 (b).

Lub
- E2 to EMF indukuje w każdej fazie wirnika na przystanku,
- R2 to opór na wirnik według fazy i
- X2 to reaktancja zatrzymania wirnika na fazę i
- S to zmiana.
W okresie błogości, ponieważ EMF indukuje w wirniku, jest bardzo wysoki, jak już wskazano powyżej, prąd wirnika i prąd stojana są zatem bardzo wysokie. Jednak prąd hamowania można zmniejszyć, wkładając zewnętrzną rezystancję w obwodzie wirnika.
Również od tego momentu czynniki wirnika ran są korzystne w porównaniu z silnikami wirnika klatki wiewiórki.
Silniki klatki o powierzchni około 20 kW są podłączone bezpośrednio, przy użyciu połączenia gwiazd, jeśli zapewniony jest przełącznik gwiazdy-delta. Większe silniki wymagają odporności na stojana. Silniki wirnika ran wykorzystują rezystory wirnika do ograniczenia prądu, a także rozwoju par hamulcowych.
Problemy z oceną termiczną mogą wystąpić w przypadku częstych praw hamowania, jak już wyjaśniono powyżej, a styczniki mogą wymagać częstej konserwacji.
Jednoczesne odwrócenie połączeń stojana i włączenie odporności na wirnik do silników korzeniowych ran jest całkiem możliwe, ale ten sam efekt można uzyskać, włączając satatorów do uzwojeń wirnika.
Alternatywnie, klatka wirnika głębokiego paska może zapewnić wzrost efektywnej rezystancji wirnika po obsłudze wtyczki, ponieważ częstotliwość przesuwana jest nagle zwiększona z SF do (2 – s) f, gdzie F jest częstotliwością zasilania.
W praktyce, aby odwrócić dyski, w których hamowanie i uruchamianie silnika indukcyjnego w przeciwnym kierunku obejmują etapy tego samego procesu ciągłego, wtyczka jest korzystna.
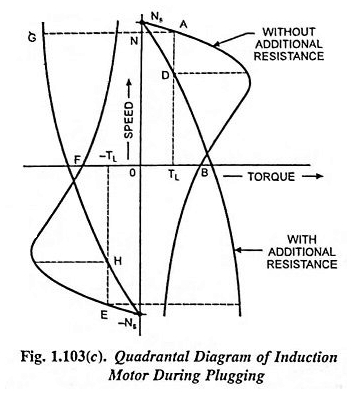
Działanie wtyczki można również wyjaśnić za pomocą schematu kwadrantu pokazanego na rysunku 1.103 (c). Charakterystyka przyspieszenia pokazanego na rysunku 1.103 (c) są w rzeczywistości rozszerzeniem charakterystyki silnika w drugim i czwartym kwadrancie. Wyjaśnienie rysunku 1.103 (c) jest dokładnie identyczne z jednym dla rysunku 1.94 (a) lub 1.94 (b).
2. Hamowanie dynamiczne (lub reostatyczne)
W tym hamowaniu elektrycznym silników indukcyjnych polifazy można uzyskać hamowanie reostatyczne poprzez odłączenie uzwojenia stojana zasilania prądu przemiennego i ekscytującym źródłem CC w celu uzyskania stacjonarnego pola DC.
W hamowaniu reostatycznym uzwojenie stojana jest używane jako uzwojenie pola DC i uzwojenia wirnika jako uzwojenia ramki. Za pomocą maszyny wirnika rannego można włożyć do obwodu wirnika, aby zapewnić obciążenie. Jednak w przypadku maszyn do klatki wiewiórki wirnik sama wirnika musi uformować obciążenie.
Źródło podniecenia może być zapewnione przez niezależne źródło CC lub z sektora prądu przemiennego przez zestaw prostowników transformatorów, jak pokazano na rysunku 1.105.
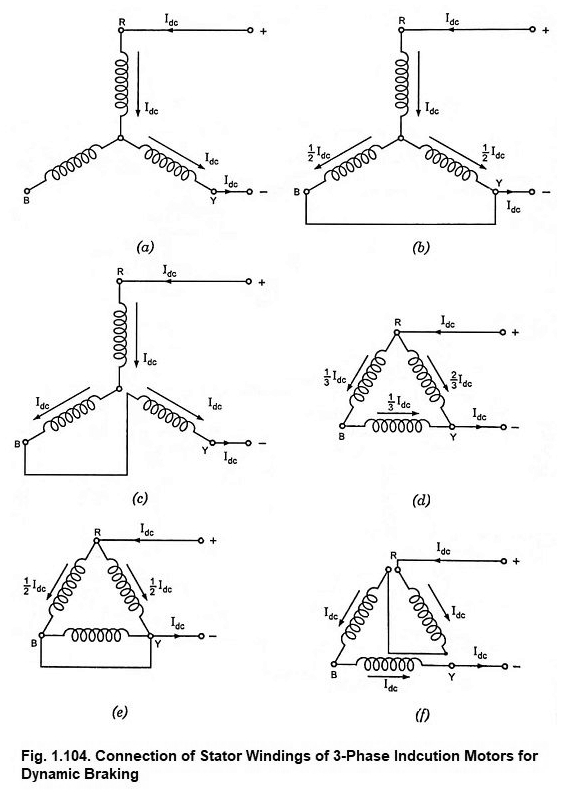
Różne metody łączenia stojana ze źródłem CC przedstawiono na rysunku 1.104. Chociaż połączenia pokazane na ryc. 1.104 (c) i 1.104 (f) dają jednolity prąd trzech faz, ale są skomplikowane podczas operacji przełączania.
Pod tym względem prostsze połączenia pokazane na ryc. 1.104. (a) i (b) są ogólnie używane.

Typowy schemat połączenia podano na rysunku 1.105; Maszyna działa jak silnik z zamkniętymi stycznikami, podczas gdy z zamkniętym otwartym i B prąd stały jest dostarczany przez dwie fazy stojanowe, a trzecia pozostała w otwartym obwodzie.
Rezystancja R 'jest wstawiana do obwodu stojana w celu ograniczenia jego prądu. W przypadku silników wirnika rannego wkłada się dodatkowy opór do obwodu wirnika w celu kontrolowania efektu hamowania.
Podczas gdy maszyna działa normalnie w postaci silnika, jego stojan po polu magnetycznym działa z synchroniczną prędkością w tym samym kierunku, co wirnik, ale nieco szybszy niż przewodniki wirnika.
Gdy uzwojenia stojana zostaną odłączone od mocy prądu przemiennego i wzbudzone DC, wytwarzane pole magnetyczne będzie nieruchome w przestrzeni, dzięki czemu przewody wirnika przekraczające pole z prędkością (1 – s) NS lub SNS.
Prądy indukowane w sterownikach wirników będą przeciwne w kierunku odpowiadającej operacji motoryzacyjnej, wytwarzając moment obrotowy hamowania.
Chociaż przepływ powietrza jest stacjonarny, będzie taka sama liczba biegunów, jak gdy maszyna będzie wzbudzona AC, a prądy wirnika będą zatem mieć częstotliwość zbliżoną do częstotliwości odpowiadającej prędkości synchronicznej (to znaczy NS) początkowo, ale która zmniejsza się wraz z prędkością wirnika i stają się zerowe do samodzielnego, jest to częstotliwość wirników.
Podobnie EMF indukowane w wirniku zmniejsza się o maksimum, gdy wirnik jest wykonywany, od zera do stop.
Innymi słowy, emf indukowany w wirniku będzie podany przez SE2, gdzie E2 jest amplitudą emf indukowaną w wirniku, gdy będzie działał przed polem z prędkością ns.
Widać zatem, że warunki wirnika podczas reostatycznego hamowania DC z prędkością spada z synchronicznego do zatrzymania są prawie takie samo, jak, gdy silnik przyspiesza normalne.
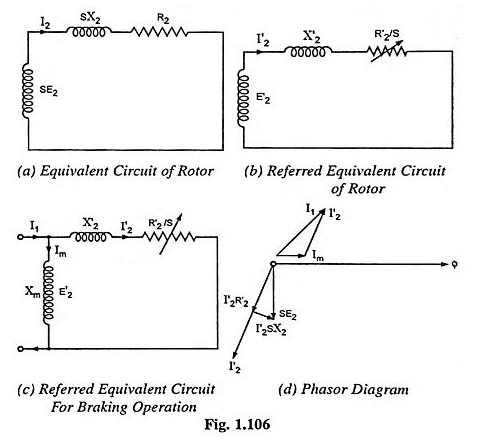
W związku z tym równoważny obwód wirnika może być reprezentowany, jak wskazano na rysunku 1.106 (a). Dzieląc napięcie i impedancję przez S, mamy ilustrowany obwód na rysunku 1.106 (b) niosący ten sam prąd i2.
Ponieważ uzwojenie stojana transportuje tylko prąd stały, indukcyjność stojana nie ma wpływu na działanie w reżimie stałym. Napięcie CC nakładane przez uzwojenie stojana jest ustalane jedynie przez odporność na uzwojenie stojana. W jądrze stojana nie będzie utraty żelaza.
Ale utrata jądra wirnika będzie miała znaczną wielkość, a zatem wartość rezystancyjna dla wirnika zwróconego do stojana, która określa parę opracowaną podczas hamowania, musi zostać poprawiona, aby uwzględnić ją, EMF indukuje wirnik, przy prędkości synchronizacji, E’2 zostanie podana przez IMXM, gdzie IM stanowi prąd zasunięcia przechodzącej przez magnetyzację.
Ilustrowany obwód na rysunku 1.106 (b) można zmodyfikować w ilustrowanym obwodzie na rysunku 1.106 (c). Schemat fazowy odpowiadający temu zmodyfikowanego obwodu pokazano na rysunku 1.106 (d),
Można zauważyć, że prąd wirnika naprzemiennie, taki jak on, jest wytwarzany przez stały przepływ, spowodowany przez magnenetyzujący MMF IMN1, który pozostaje stacjonarny w przestrzeni.
Jednak, gdy widzi się z wirnika, magnetyator MMF i wynikowy przepływ stojana wydają się naprzemiennie.
Ponadto, ponieważ wirnik Ampère-Contations I2N2 (= I′2N1) muszą być zrównoważone przez tatorów stojana ampère w celu utrzymania wież magnetyzacji IMN1, wieże stojana i1n1 jako wirnika, reprezentuje fazową sumę IMN1 i I′2N1.
Obecny prąd naprzemienny I1 zależy od amplitudy prądu stałego transportowanego przez stojana i charakteru połączenia uzwojenia stojana, jak wyjaśniono powyżej.
Z powyższej dyskusji można stwierdzić, że działanie silnika podczas reostatycznego hamowania DC można analizować za pomocą równoważnego obwodu (rodzaju, którego już znamy) pokazane na rysunku 1.106 (c).
Moment hamowania można określić na podstawie związku
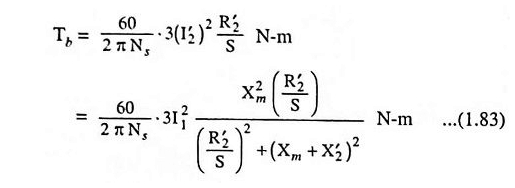
Powyższe równanie pozwala nam określić moment obrotowy hamowania przy dowolnej prędkości danego silnika indukcyjnego, gdy jest podekscytowany prądem stałym, I1 odpowiadającym równoważnym AC, który wytworzyłby ten sam MMF jak ten przez prawdziwy prąd stały transportowany przez uzwojenia stojana.
Różnicowanie równania. (1,83) WRT s i asymiluj go do zera dla maksimum, mamy zmianę odpowiadającą maksymalnego momentu hamowania

i maksymalna para,

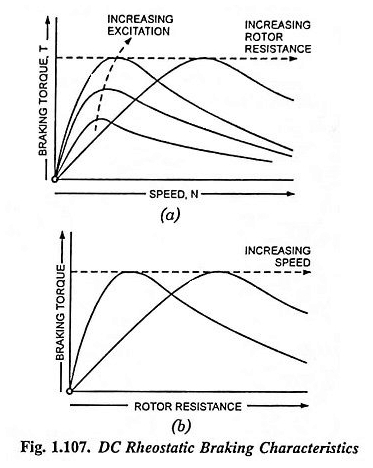
Typowe charakterystyki wydajności silnika indukcyjnego pokazano na rycinie 1.107.
Amplituda momentu hamowania opracowanego przez silnik zależy od wzbudzenia (odporność pola opracowanego przez wałek stojana), odporność obwodu wirnika i prędkości silnika.
Wpływ zmienności podniecenia I1 i rezystancji wirnika R2 pokazano również na rycinie 1.107 (a). Do celów projektowych czasami stosuje się krzywe oporu na wirnik momentu obrotowego zilustrowanego na rycinie 1.107 (b).
Wraz ze wzrostem odporności na wirnik RO2 wzrasta również prędkość maksymalnego momentu hamowania. Jednak maksymalny moment obrotowy nie wzrastałby proporcji do obecnego kwadratu (I21), jak wskazuje równanie.
(1,85), ponieważ reaktancja magnetyzacji XM zmniejsza się z powodu nasycenia spowodowanego wzrostem prądu I1.
Stabilna operacja hamowania znajduje się w części stewayu krzywej prędkości momentu obrotowego [to znaczy po lewej stronie maksymalnej pozycji momentu obrotowego na rysunku 1.107 (a)].
Jeśli jest nieumyślnie, prędkość wzrośnie powyżej, do której moment obrotowy jest maksymalny, nowy wzrost prędkości jest spowodowany spadkiem momentu hamowania, co może prowadzić do nowego wzrostu prędkości w przypadku obciążenia remontu.
Na początku zastosowania hamowania potrzebujemy zatem wysokiej rezystancji w obwodzie wirnika, który należy stopniowo zmniejszać ze spadkiem prędkości.
Moment hamowania można sprawdzić dowolną lub następującą dwie metody: (i) poprzez kontrolowanie du du du du du du du du Duc (II) poprzez zmianę oporu na wirnik.
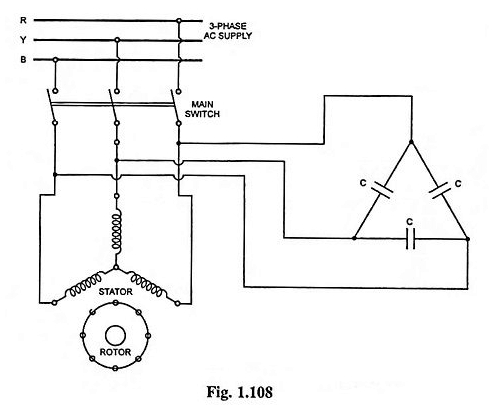
Dynamiczne hamowanie prądu przemiennego można uzyskać za pomocą samokontroli poprzez podłączenie uzwojeń stojana z bankiem statycznych kondensatorów, jak pokazano na rysunku 1.108. W takim przypadku maszyna indukcyjna działa jako generator indukcyjny otrzymujący emocje AC od statycznych kondensatorów.
Wytworzona energia elektryczna jest rozpraszana w postaci ciepła w obwodzie wirnika. Dynamiczne hamowanie prądu przemiennego nie jest popularne ze względu na stosunkowo wysokie koszty banków kondensatorów.
Dynamiczne hamowanie DC wymaga niewielkiej mocy zasilacza i zapewnia gładki moment hamowania, przydatny do uzwojeń wydobywczych i wysokich obciążeń bezwładności.
Jego zaletami w porównaniu z wtyczką jest brak przeciwnego pola obrotu obrotu [a zatem brak tendencji do biegania maszyny] i utraty niższego wirnika. Zwiększając odporność na wirnik, moment hamowania może być bardziej skuteczny przy wyższych prędkościach.
Ta metoda jest zatem bardzo odpowiednia do późnych opłat przeglądowych. W przypadku silnika klatki wiewiórki, ponieważ odporność na wirnik jest niewielki, zastosuje moment hamowania przy bardzo niskich prędkościach, a zatem przydatny tylko do przyniesienia obciążenia.
Pojawienie się automatycznej kontroli dynamicznego hamowania w hamowaniu elektrycznym silników indukcyjnych polifazy za pomocą systemów pętli zamkniętej, sprawiło, że silniki indukcyjne bardziej popularne niż silniki DC, w szczególności do zatrudnienia dysków w Palans Mining.
Rycina 1.109 pokazuje charakterystykę kwadrantu silnika indukcyjnego w dynamicznym stanie hamowania.

3. Hamowanie regeneracyjne
Hamowanie regeneracyjne jest nieodłączną cechą silnika indukcyjnego, ponieważ działa jako generator indukcyjny, gdy rozciąga się z prędkością powyżej synchronicznej i zwraca moc do linii zasilania.
Trzy -fazowy silnik indukcyjny można zaprojektować do działania z dużą prędkością do synchronicznej prędkości przy użyciu jednego z następujących procesów.
- Przejdź do zasilania o niskiej częstotliwości w silnikach indukcyjnych kontrolowanych częstotliwości, aby zmniejszyć prędkość roboczą czytnika.
- Przenieś obciążenia mechanizmu podnoszenia, takiego jak dźwigi, palans, kopacze itp.
- Przejdź do większej operacji bieguna z mniejszych silników klatkowych wiewiórczych.
We wszystkich powyższych procesach rozwinięte przesunięcie i moment obrotowy stają się ujemne, jak pokazano na rysunku 1.110, a zatem maszyna działa jako generator, otrzymując energię mechaniczną i przywracając ją do układu zasilania w postaci energii elektrycznej.
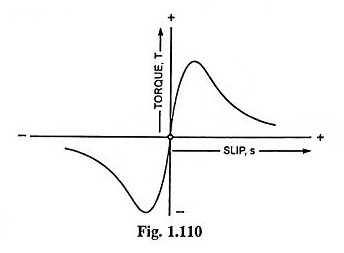
Jeśli obciążenie powoduje silnik powyżej prędkości synchronicznej, nie jest wymagana operacja przełączania. Po napędzaniu maszyny powyżej prędkości synchronicznej operacja hamowania rozpoczyna się automatycznie.
Punkt pracy będzie zależeć od amplitudy momentu obciążenia i charakterystycznych charakterystyki prędkości momentu obrotowego maszyny podczas operacji generowania.
Zmieniając rezystancję w obwodzie wirnika, możliwe jest działanie z dowolną prędkością powyżej prędkości synchronicznej podczas hamowania.
W przypadku, gdy moment obciążenia obciążenia przekracza maksymalny moment hamowania, którego maszyna jest zdolna, system staje się niestabilny, a prędkość wzrośnie jeszcze bardziej, prawdopodobnie do katastrofalnej wartości, ponieważ im więcej maszyny będzie działać szybko, przynajmniej zostanie opracowany moment hamowania.
W przypadku silnika indukcyjnego klatki wiewiórki, stabilna prędkość uzyskuje się z prędkością znacznie wyższą niż prędkość synchroniczna, a hamowanie regeneracyjne można zastosować tylko wtedy, gdy silnik jest specjalnie zaprojektowany w celu odporności na nadmierną prędkość.
Hamowanie regeneracyjne ma wadę możliwości hamowania tylko przy super synchronicznych prędkościach, aw konsekwencji jest seldome używany do hamowania.
Ta metoda hamowania elektrycznego silników indukcyjnych polifazy można zastosować tylko w rodzaju mechanizmu podnoszenia lub z wielozadaniowym silnikiem klatki wiewiórkowej. Jest również korzystny na kolei górskich.
Zwraca około 20% całkowitej energii do niektórych wyścigów kolejowych i oszczędza dużo ubrań hamulcowych.