INDUKCJA Charakterystyka przesunięcia momentu obrotowego silnika:
Ekspresję charakterystyki ślizgania się momentu obrotowego silnika indukcyjnego (T (S)) można łatwo uzyskać poprzez znalezienie równoważnego obwodu obwodu po lewej stronie AB na rycinie 9.12.
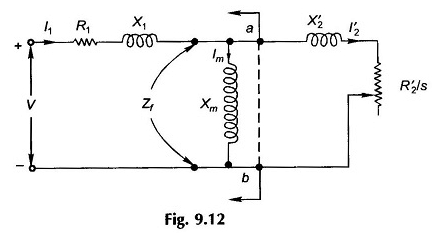
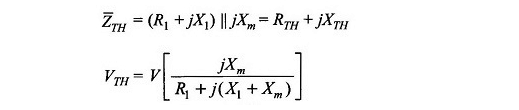
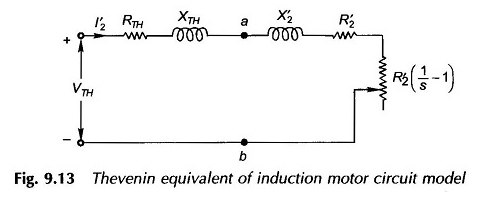
Obwód jest następnie zmniejszany na rycinie 9.13, w którym praktyczne jest przyjmowanie VTH jako napięcia odniesienia.
Na rysunku 9.13

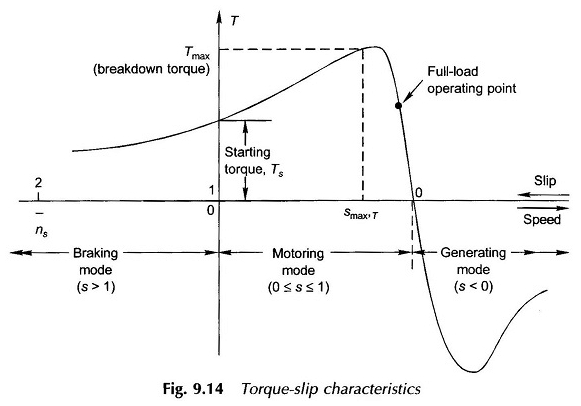
Równanie (9.22) jest ekspresją momentu obrotowego opracowanego jako funkcja napięcia i przesunięcia. Dla danej wartości przesuwanej moment obrotowy jest proporcjonalny do kwadratu napięcia. Charakterystyka przesuwania momentu ślizgowego silnika indukcyjnego na stałym napięciu (nominalnym) prześledzono na rycinie 9.14.
Charakterystyka charakterystyki poślizgu silnika indukcyjnego podano poniżej:
1. Tryb motocyklowy: 0 ≤ s ≤ 1
W tym zakresie poślizgu odporność obciążenia w modelu obwodu na rysunku 9.13 jest dodatnia, to znaczy, że moc mechaniczna jest wyjściem lub rozwiniętym momentem obrotowym znajduje się w kierunku, w którym obraca się wirnik. Również:
- Para wynosi zero przy S = 0, zgodnie z rozumowaniem jakościowym.
- Moment ma maksymalną wartość, zwaną momentem obrotowym (TBD) w Slip Smax, t. Silnik zwalniałby, dopóki nie zostanie załadowany więcej niż moment obrotowy.
- W S = 1 to znaczy, że gdy wirnik jest stacjonarny, para odpowiada początkowemu momentowi, Ts. W normalnie zaprojektowanym silniku TS jest znacznie mniejsza niż TBD.
- Normalny punkt pracy znajduje się znacznie poniżej TBD. Poślizg pełnego naładowania wynosi na ogół 2,8%.
- Charakterystyka ślizgania się momentu obrotowego indukcji silnika zakazu ładowania nieco poza pełnym obciążeniem są prawie liniowe.
2. Tryb generacji: S <0
Przesunięcie ujemne obejmuje wirnik działający z super synchroniczną prędkością (n> ns). Rezystancja obciążenia jest ujemna w modelu obwodu z rysunku 9.13, co oznacza, że moc mechaniczna musi być wprowadzona, podczas gdy moc elektryczna wygina się na zaciskach maszyny.
3. Tryb hamowania: S> 1
Silnik działa w kierunku przeciwnym do pola obrotowego (tj. Negatywnego), pochłaniając moc mechaniczną (działanie hamowania), które jest rozproszone w postaci ciepła w miedzi wirnika.
Maksymalny moment obrotowy (wentylacja):
Podczas gdy maksymalny moment obrotowy i przesunięcie, w którym występuje, można uzyskać poprzez różnicowanie ekspresji równania. (9.22), warunek maksymalnego momentu obrotowego można łatwiej uzyskać z teorii maksymalnego przenoszenia mocy teorii obwodów.
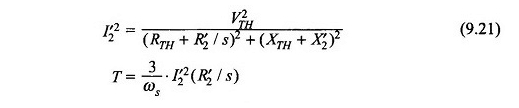
Jak wiemy, moment obrotowy jest maksymalny, gdy I’22 (R’2 / s) jest maksymalny, to znaczy, że maksymalna moc jest pochłaniana przez R’2 / s na rycinie 9.13. Ten warunek jest podany jako

Zastępowanie w równaniu. (9.22) i uprościć

Natychmiast obserwuje się, że maksymalny moment obrotowy jest niezależny od oporu wirnika (R’2), podczas gdy przesunięcie, w którym występuje, jest wprost proporcjonalne.
Charakterystykę przesuwną momentu przesuwnego silnika indukcyjnego z pierścieniem ślizgowym można łatwo zmodyfikować, dodając oporność zewnętrzną, jak pokazano na rycinie 9.15a o cztery z tych właściwości wraz ze wzrostem progresywnej rezystancji w obwodzie wirnika. Widzimy to w zależności od równania.
(9.24), maksymalny moment obrotowy pozostaje niezmieniony zgodnie z równaniem. (9.23) Przesuwanie do maksymalnego momentu obrotowego wzrasta proporcjonalnie, gdy opór jest dodawany do obwodu wirnika.

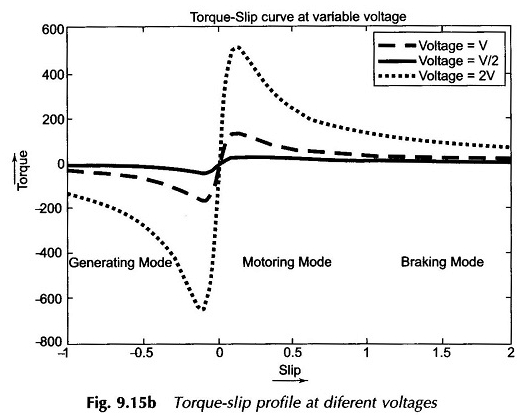
Rysunek 9.15b wskazuje profil TS z różnymi napięciami zasilającymi. Prędkość można również kontrolować w ten sposób, modyfikując napięcie stojana. Można zauważyć, że moment obrotowy rozwinął się w silniku indukcyjnym proporcjonalnym do kwadratu napięcia terminala.
Para początkowa:
Pozostawianie s = 1 w równaniu. (9.22)

Początkowe moment obrotowy wzrasta poprzez dodanie rezystancji obwodu wirnika. Równania. (9.23) Maksymalny moment początkowy uzyskuje się dla (smax’t = 1)

Jednocześnie prąd początkowy zmniejszy się (patrz równ. (9.21)). Jest to rzeczywiście zaleta silnika indukcyjnego pierścienia przesuwnego, w którym wysoki moment początkowy jest uzyskiwany przy niskim prądzie początkowym.
Przybliżenie:
Czasami, aby mieć wrażenie (przybliżona odpowiedź) cechy operacyjnej, praktyczne jest założenie, że impedancja stojana jest znikoma, która prowadzi (patrz ryc. 9.13)
![]()
W równoważnym obwodzie Thevenin na rycinie 9.13 tak, że VTH = V. Następnie podąża za równaniami (9.21) do (9,26), że to

Maksymalny moment początkowy uzyskuje się w stanie
Niektóre przybliżone relacje o niskiej zmianie:
Wokół nominalnej prędkości (pełne obciążenie) przesuwanie silnika indukcyjnego jest tak małe, że
![]()
Aby X’2 można całkowicie zaniedbać w uproszczonej analizie. Równania (9.27) i (9.28), a następnie uprościć
Jest to natychmiast obserwowane z równania. (9.35), że charakterystyka ślizgania się momentu obrotowego silnika indukcyjnego jest prawie liniowa w obszarze niskiego przesunięcia, co wyjaśnia liniowy kształt charakterystyki, jak pokazano na rycinie 9.14.
Maksymalne wyjście wyjściowe:
Ponieważ prędkość silnika indukcyjnego jest zmniejszona wraz z obciążeniem, maksymalna mechaniczna moc wyjściowa nie odpowiada prędkości (przesuwanej), do której opracowywany jest maksymalny moment obrotowy. Dla maksymalnej mechanicznej mocy wyjściowej warunek uzyskuje się z rysunku 9.13

Maksymalną moc można następnie znaleźć odpowiadającą przesunięciu zdefiniowanemu przez równanie. (9.36). Jednak stan ten odpowiada bardzo niskiej wydajności i bardzo dużym prądowi i jest daleko poza normalnym regionem roboczym silnika.
Ograniczenie charakterystyki przesunięcia silnika indukcyjnego:
Wartości parametrów modelu obwodu należy określić w warunkach zbliżających się do warunków roboczych, dla których należy zastosować model.
Prawidłowe parametry modelu obwodu dla normalnego stanu roboczego dałyby błędne wyniki, gdy są używane do nieprawidłowych wartości przesuwnych.
Na początku silnik kilkakrotnie ciągnie prąd nominalny, powodując nasycenie jądra i znaczny wzrost reakcji stojana i wirnika. Ponadto częstotliwość wirnika jest wysoka (identyczna z stojanem), sterowniki wirnika mają wyższy opór.
W związku z tym parametry dobre dla normalnych warunków pracy dałyby pesymistyczny wynik dla prądu początkowego (większego niż wartość rzeczywistą) i moment początkowy.