Indukcyjna kontrola wektora silnika:
Jedynym pomysłem kontroli wektora silnika indukcyjnego jest posiadanie czytnika elektrycznego, który musi oferować wyższą wydajność, którą silnik CC wzbudził osobno szeroko stosowany w branży.
Ponadto taki czytelnik powinien również stać się solidną, niezawodną alternatywą, bez konserwacji i tańszego odtwarzacza CC. Kilka lat temu silnik DC podekscytowany osobno był uważany za główny koń roboczy w przemyśle.
Wynika to z szybszej wydajności dynamicznej w porównaniu z silnikiem indukcyjnym. Szybsza dynamiczna reakcja silnika CC leży w podwójnie odżywanym silniku z instalacją związaną z momentem obrotowym i przepływem w silniku.
Przed wprowadzeniem kontroli wektora silnika indukcyjnego metody, które cieszyły się szeroką akceptowalnością w kontrolowaniu jazdy silnika indukcyjnego klatki, nazywane są kontrolą napięcia, kontrolą częstotliwości, kontrolą oporu wirnika, sterowaniem v / f, kontroli przepływu, kontroli poślizgu, kontroli odzyskiwania zasilania przesuwnego itp.
Wszystkie te metody sterowania są kwalifikowane jako kontrola skalarna silnika indukcyjnego, a wraz z nimi silnik klatki ma niższą wydajność dynamiczną w porównaniu z osobno wzbudzonym silnikiem.
Starając się mieć niezbędny, solidny i wysokowydajny czytnik AC, badacz chciał osiągnąć wydajność i wzmocnić charakterystykę silnika CC osobno za pomocą silnika indukcyjnego z wirnikiem klatki.
W tym sensie Blaschke wprowadził pojęcie kontroli wektorowej silnika indukcyjnego. Blaschke w 1972 r. Wprowadził zasadę orientacji na ziemi, aby wykonać charakterystykę silnika DC w napędu silnika indukcyjnego.
W tym samym zastosował oddzieloną kontrolę momentu obrotowego i przepływu w silniku i nadał swoje imię jako kontrola transvector.
Czytnik silników indukcyjnych w klatce z kontrolą kontrolną lub zorientowaną na pole oferuje wysoki poziom dynamicznej wydajności i kontrolę zamkniętej pętli powiązanej z tym czytnikiem, oferuje długoterminową stabilność systemu.
Chociaż nie ma poważnej różnicy między kontrolami skalarnymi i wektorowymi, te ostatnie ma pewne właściwości, które sprawiają, że jest to korzystne jako system sterowania o wysokiej wydajności dynamicznej.
Kontrola wektora jest również nazywana niezależną lub oddzieloną kontrolą, w której sprawdzane są wektory momentu obrotowego i prądu przepływowego.
Jest to dobrze ustalone fakt, że w trybie kontroli wektora czytnik silnika klatki jest liniowy i że zachowuje się jako całkowicie kompensowany silnik prądu ciągłego, w którym kontrola prądu wzmacniającego bezpośrednio wpływa na moment elektromagnetyczny opracowany przez czytelnika.
Podobnie, w silniku klatki, metoda kontroli wektora, dwie prądy kwadratowe odpowiedzialne odpowiednio za produkcję przepływu i moment obrotowy są niezależnie kontrolowane, a odpowiedź bieżącego komponentu producenta momentu obrotowego jest bardzo szybka, co zapewnia szybszą kontrolę momentu obrotowego, a zatem czytelnik ma wysoki poziom wydajności dynamicznej.
W szerokim sensie kontrola silnika indukcyjnego klatki, ponieważ zachowuje się on jako całkowicie kompensowany silnik prądu ciągłego jest znany jako jego wektor.
W takim przypadku prądy stojarowe są wyrażone w odniesieniu do ram współrzędnych, które działają w synchronizmie z wektorem stojana lub wirnika MMF.
Prądy stojanowe wyrażone na tych współrzędnych są rozwiązywane w dwóch elementach ortogonalnych, które wytwarzają przepływ i moment obrotowy w silniku. Są one podobne do ciągłego silnika prądu, w którym moment obrotowy i przepływ są kontrolowane przez niezależne kontrolowanie ram zbrojenia i pola.
Aby kontrolować moment obrotowy i przepływ (zatem prędkość) niezależnie w silniku indukcyjnym, konieczne jest kontrolowanie amplitudy i fazy trzech prądów stojanych (IAS, IBS, ICS) przez szybki falownik.
W tym celu zwykle stosuje się CC-TVSI (prądowy falownik źródła napięcia). Taki algorytm kontrolny byłby bardzo zaangażowany.
Zastosowanie jest wykonane z transformacji trzech do dwóch faz (dobrze znana operacja macierzy). Dwa prądy fazowe, ID i IQ w kwadraturze fazowej wymagają kontroli dwóch amplitud i fazy, która jest przeprowadzana przez kontrolę wektora.
Kontrola wektora metody silnika indukcyjnego jest kształtem schematu blokowego pokazano na rysunku 11.63 Niektóre kluczowe etapy są następujące.
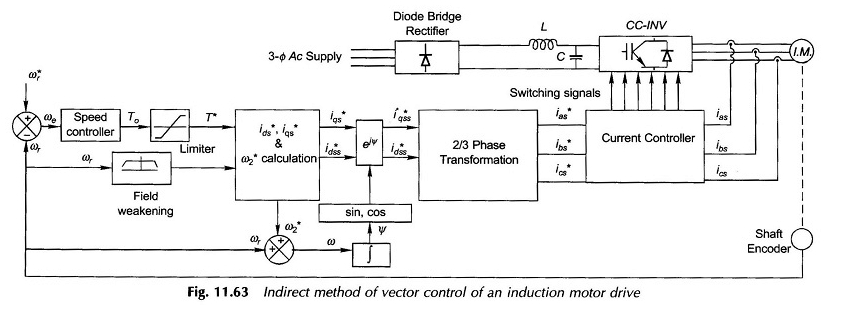
Na podstawie sygnału prędkości silnika (ωr) i pożądanej prędkości (ω * r) określono błąd ωe. Kontroler prędkości oblicza moment obrotowy silnika (do) niezbędnego do skorygowania prędkości przechodzącej przez ograniczenie w celu ustalenia sygnału momentu obrotowego t *.
W równoległym bloku pola, osłabiający blok prędkość silnika ωr generuje inny sygnał.
Te dwa sygnały są używane do obliczenia I * DS i I * QS (idealne prądy kwadratowe) i korekcję prędkości ω * 2.
Ω = ωr + ω * r jest zintegrowany, który jest następnie używany do znalezienia transformacji ejψ. Ta transformacja przeprowadzona (i * ds, i * qs) daje ostatni idealny zestaw (i * dss, i * qss).
Transformacja fazy 2/3 (i * dss, i * qss) daje idealny prąd stojany (i * as, i * bs, i * cs).
Zmierzone prądy stojana (IAS, IBS, ICS) są porównywane do (i * as, i * bs, i * cs) przez bieżący kontroler i sześć sygnałów generowanych kontroli prądów napędzanych silnikiem indukcyjnym.
Powyższe jest uproszczonym wyjaśnieniem algorytmu kontroli wektora do kontroli silnika indukcyjnego.
Kontrolując wektor silnika indukcyjnego przepływ wirnika jest regulowany przez kontrolowanie prądu uzwojenia stojana. Aby uregulować przepływ wirnika, pożądana jest również znajomość jego pozycji. Pozycja przepływu wirnika jest wykrywana lub szacowana.
W związku z tym, zgodnie z metodologii przyjętych w celu oceny położenia wektora przepływu wirnika, kontrola wektora nazywana jest bezpośrednią kontrolą wektora lub pośredniej kontroli wektora.