Indukcyjne hamowanie silnika:
Trzy rodzaje hamowania silnika indukcyjnego, mianowicie hamowanie regeneracyjne, dynamiczne i przeciwprądowe można również osiągnąć za pomocą silników indukcyjnych.
Hamowanie regeneracyjne
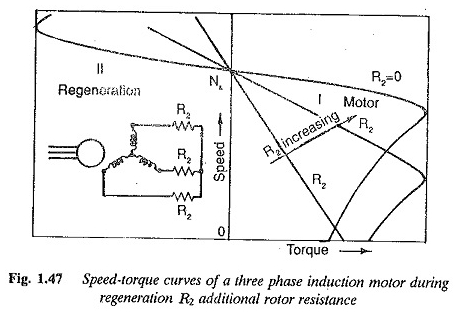
Gdy wirnik silnika indukcyjnego działa szybciej niż pole stojana, przesunięcie staje się ujemne, a maszyna generuje moc. Dlatego za każdym razem, gdy silnik działa szybciej niż pole obrotowe, zachodzi hamowanie regeneracyjne i ke
Części rotacyjne są zwracane do sektora. Krzywa prędkości momentu obrotowego rozciąga się na drugi kwadrant (ryc. 1.47). Prędkość silnika maleje. Moment hamowania obsługuje silnik ze stałą prędkością, zatrzymując jego tendencję do szybszego obracania się.
Ze względu na wpływ odporności na stojana maksymalny moment obrotowy rozwinięty podczas regeneracji jest wyższy niż maksymalny moment obrotowy podczas rękawa. W Palans i Żurawach silnik napędowy działa szybciej niż prędkość synchroniczna.
Ta sytuacja ma miejsce, gdy wciągnik podnosi pustą klatkę. Ze względu na przeciwwagę sprawa może nabrać niebezpiecznych prędkości. Przejście odbywa się prawie automatycznie i opracowano parę, aby powstrzymać przyspieszenie i regenerację.
Ten rodzaj operacji jest również możliwy, gdy obciążenie zmienia silnik podczas obciążenia obciążenia. Automatyczna regeneracja zatrzymuje nadmierne przyspieszenie. Kontrola oporności na wirnik można zastosować, aby uzyskać lepszy moment obrotowy hamowania.
Hamowanie regeneracyjne jest również możliwe dzięki silnikowi zmiany bieguny, gdy prędkość wzrosła z wysokiej do niskiej. Można to również osiągnąć w czytniku o zmiennej częstotliwości.
Dzięki tymczasowo zmniejszając częstotliwość silnika, prędkość synchroniczna maleje, a warunki sprzyjające regeneracji.
Podczas hamowania regeneracyjnego istnieje możliwość niebezpiecznych prędkości, jeśli punkt pracy podczas hamowania wpada w niestabilną część charakterystyki. Dzieje się tak, jeśli moment obciążenia jest większy niż moment obrotowy silnika.
Rozwinięty moment obrotowy nie może spowolnić silnika i ma miejsce nadmierne przyspieszenie. Ta możliwość można wyeliminować za pomocą wysokiej odporności w wirnik.
Dynamiczne hamowanie
Dynamiczne hamowanie służy do hamowania czytelnika niereversjennego. Stojan jest przenoszony z sektora AC na dania główne (ryc. 1.48 (a)). DC przekraczające stojan instaluje pole stacjonarne. Indukuje to prądy wirnika, które wytwarzają parę, aby szybko przynieść wirnik.
Rozwijał się moment obrotowy, a opóźnienie podczas hamowania można kontrolować za pomocą ilości prądu stałego. Dodatkowa oporność R1 i R2E w obwodach stojana i wirnika odpowiednio kontroluje pary wzbudzenia i hamowania DC.

Równoważny obwód i schemat fazy silnika podczas hamowania dynamicznego przedstawiono na rysunku 1.48 (c). Gdy stojan jest zasilany z DC, produkt MMF jest stacjonarny. Ten MMF zależy od połączeń stojana dla zasilania DC, liczby okrążeń i prądu.
Możliwe połączenia stojana dla zasilacza DC są reprezentowane na rysunku 1.49. Równoważny prąd CC można określić poprzez asymilację MMF wytworzone przez ten równoważny prąd i prąd CA.
Równoważny prąd pierwotny jest odpowiedzialny za magnetyzację i prąd wtórny momentu obrotowego. Para jest podana przez

Gdzie jest zmiana.
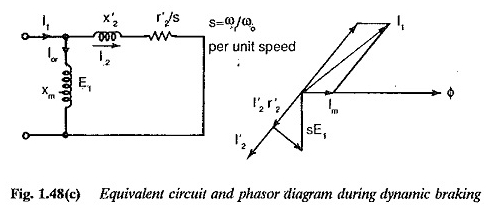
Równoważnego obwodu, który mamy

Również ze schematu fazowego mamy
![]()
Od którego można ustalić MI. Wartość XM jest podana przez
![]()
Para jest

Krzywa przesuwna momentu obrotowego można określić za pomocą tego wyrażenia. Maksymalny moment obrotowy występuje na zmiany

A maksymalny moment hamowania jest

Charakterystykę można również narysować za pomocą relacji

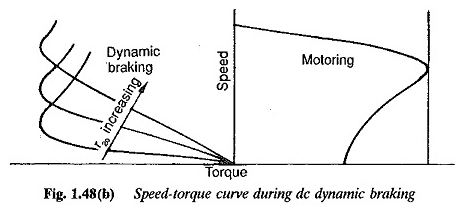
Moment hamowania jest proporcjonalny do I21. Jednak nasycenie odgrywa własną rolę i istnieje wyczerpanie pary. Wpływ R’2 jest podobny do efektów podczas jazdy, to znaczy
Nie modyfikuje wartości TMB, ale modyfikuje wartość prędkości, przy której występuje TMB. Typowe krzywe prędkości prędkości przedstawiono na rysunku 1.48.
Wartości I1 i R’2 są kontrolowane w celu zapewnienia pożądanego hamowania. Pierwszy jest ograniczony przez R1. Ta metoda jest ogólnie stosowana do spowolnienia silników powodujących aktywne obciążenia. Dynamiczne hamowanie jest stosowane wspólnie z automatyczną kontrolą. Hamowanie silnika indukcyjnego jest bardziej popularne u Palans niż silnik DC, dzięki tej funkcji.
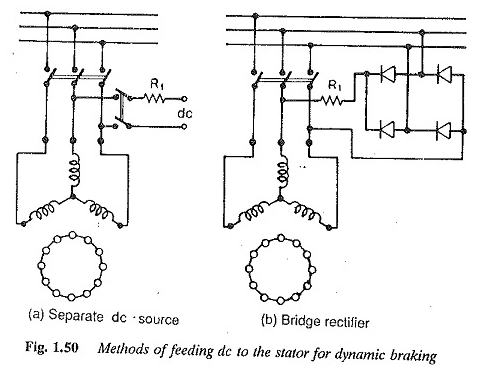
Metody zasilania stojaka bezpośredniego zasilania są przedstawione na ryc. 1.50. Może być zapewniony przez zasilacz CC przy użyciu ograniczonego oporu R1 w obwodzie do kontrolowania podniecenia DC. Kontrola momentu obrotowego uzyskuje się przez zmianę odporności na wirnik.
Alternatywnie, zasilacz można naprawić za pomocą prostownika diodowego, a powstały DC może zostać przeniesiony do silnika.
Podczas dynamicznego hamowania prądu przemiennego stojan trafił do banku pojemności. Maszyna działa jako podekscytowany generator automatycznego indukcji. Cała energia mechaniczna jest rozpraszana w postaci energii elektrycznej w odporności na wirnik. Ta metoda nie jest opłacalna, ze względu na koszt kondensatorów.
Aktualny
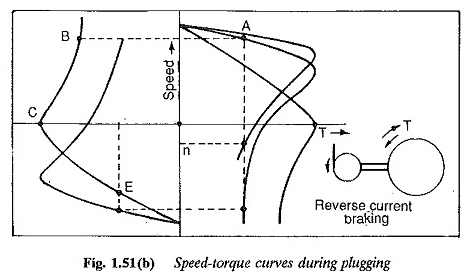
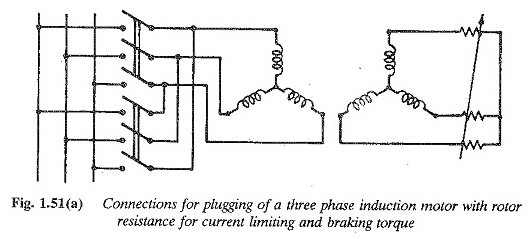
Modyfikując sekwencję fazową wejścia do hamowania silnika indukcyjnego, sterowanie pola stojana można odwrócić. W praktyce odbywa się to poprzez wymianę zasilania silnika (ryc. 1.51 (a)).
Opracowywany jest moment obrotowy hamowania, a silnik spoczywa bardzo szybko. Silnik musi być wygaszony z sektora, gdy zbliża się zerowa prędkość. W przeciwnym razie opracowany moment obrotowy przyspiesza silnik w przeciwnym kierunku. Ta metoda nazywa się również wtykami.
Gdy silnik jest blokowany, napięcie indukowane E w ramce i zastosowane napięcie V może być wzajemnie, a prąd podczas hamowania jest spowodowany przez E + V.
Może to prowadzić do bardzo wysokich prądów, które są ograniczone wysoką odpornością na wirnik, a także skutecznie zwiększyć moment obrotowy hamowania.
Krzywa prędkości przekładni silnika indukcyjnego można zmodyfikować poprzez zmianę oporu na wirnik. Maksymalny punkt momentu obrotowego można zrobić, aby wystąpić na plaży 1-2, gdzie opracowana para ma tendencję do hamowania wirnika.
Ten moment obrotowy można również użyć do zatrzymania trendu wirnika, aby przyspieszyć z jakiegoś powodu (na przykład wersja silnika lub wskazówka zwiększająca pustą klatkę).
Wysoka opór wprowadza się do wirnika, tak że punkt pracy przesunął się do czwartego kwadrantu. Rozwijany moment hamowania zapobiega przyspieszeniu wirnika, a wirnik działa z równomierną prędkością (ryc. 1.51 (b)).
Jeśli silnik działa na przesunięciu w momencie wtyczki, całkowity moment hamowania jest sumą momentu obrotowego połączenia z (2 – s) i momentem obciążenia

TP może być kontrolowane przez zmienny opór wirnika, który ogranicza prąd hamowania.