Kontrola prędkości silnika indukcyjnego:
Kontrola bez kroku prędkości silników indukcyjnych nie może być przeprowadzana tak skutecznie i przy niskich kosztach, jak w przypadku silników DC. Różne metody kontrolowania silnika indukcyjnego można obejrzeć, biorąc pod uwagę równanie prędkości
![]()
Z tego równania widzimy, że istnieją dwie podstawowe metody kontroli prędkości silnika indukcyjnego, a mianowicie
- Kontrolować poślizg dla stałej prędkości synchronicznej i
- Synchroniczna kontrola prędkości.
Z

Istnieją dwa sposoby kontrolowania szybkości synchronicznej – kontrola częstotliwości zasilania i kontroli słupów stojana. Ta ostatnia metoda podaje kontrola kroków, ponieważ bieguny można zmodyfikować w kilku z dwóch. Zmiana słupka odbywa się tylko w silniku klatki wiewiórkowej, a także dla dwóch etapów.
Kontrola napięcia:
Jest to metoda sterowania poślizgiem o zmiennym napięciu częstotliwości stałej dostarczonej do stojana silnika. Oczywiście napięcie powinno zostać zmniejszone jedynie pod wartością nominalną.
W przypadku silnika działającego przy pełnym przesunięciu obciążenia, jeśli przesunięcie musi zostać podwojone w przypadku momentu obciążenia o stałym obciążeniu, wynika z równań (9,34) i (9,35), że napięcie musi zostać zmniejszone o współczynnik 1 / √2 i że odpowiedni prąd (I’2) wznosi się do √2 pełnej wartości obciążenia.
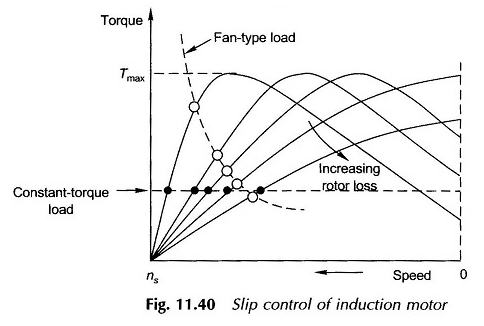
Dlatego silnik ma tendencję do przegrzania. Metoda nie nadaje się zatem do kontroli prędkości. Ma ograniczone zastosowanie dla silników, które powodują obciążenia typu wentylatora, których potrzeby momentu obrotowego są proporcjonalne do prędkości (patrz ryc. 11.40).
Jest to powszechnie stosowana metoda wentylatora sufitowego przeszkolona przez silniki indukcyjne jednoosobowe, które mają dużą impedancję zatrzymującą ograniczającą prąd narysowany przez stojana.
Kontrola oporu wirnika:
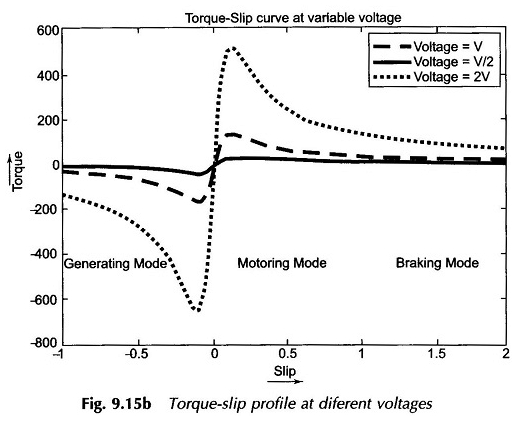
Jak sama nazwa wskazuje, ten rodzaj kontroli prędkości jest możliwy tylko dla silników indukcyjnych pierścienia. Łatwo widać, odnosząc się do rysunku 9.15, że wraz ze wzrostem rezystancji wirnika przesunięcie silnika wzrasta (krople prędkości) dla momentu obciążenia o stałym obciążeniu.
Prąd stojana zmienia się w ograniczonym zakresie, ponieważ wpływ zmian od rezystancji na przesuwanie i wirnik ma tendencję do anulowania (odnosząc się do równania (9,34)) dla małych wartości przesuwnych. Jednak moc wejściowa wzrasta. Zapewnia to utraconą moc w dodatkowej odporności na wirnik.
Wydajność silnika operacyjnego oczywiście gwałtownie maleje. Ta metoda kontroli prędkości jako taka jest zatem przyjmowana dla wąskiego zakresu prędkości i ogólnie dla operacji krótkoterminowej.

Skuteczność tego rodzaju schematu kontroli prędkości można poprawić, zwracając moc wirnika mechanicznie do drzewa wirnika lub elektrycznie do sektora. Pierwszy schemat można zaimplementować za pomocą prostownika i ciągłego silnika prądu w połączeniu z drzewem wirnika.
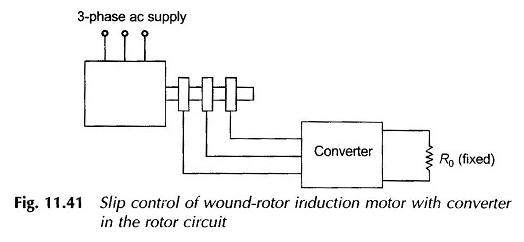
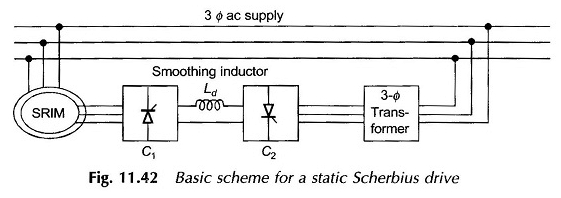
Drugi schemat wymaga konwertera częstotliwości, który przekształca zmienną moc częstotliwości na stałą częstotliwość (zasilanie) w celu zmniejszenia energii elektrycznej do sektora. Wzory te mogą być zaprojektowane przez obwody SCR (patrz rysunki 11.41 i 11.42).
Możliwe jest osiągnięcie prędkości supersynchronicznej poprzez wstrzyknięcie mocy przy odpowiedniej częstotliwości w wirniku za pomocą regulowanego źródła częstotliwości.
Widzimy, że wręcz przeciwnie do dodania oporu do wirnika, w którym moc jest pobierana z wirnika (i zmarnowana w zewnętrznym oporze).
Szeroki zakres kontroli prędkości powyżej i poniżej jest synchroniczny, jest możliwa poprzez włączenie urządzeń do konwersji częstotliwości do obwodu wirnika.
Kontrola częstotliwości:
Synchroniczna prędkość silnika indukcyjnego może być kontrolowana w kroku bez szerokiego zakresu poprzez modyfikację częstotliwości zasilania. Zgodnie z równaniem. (9.1) Pływający man powietrza wynikający z bieguny


W konsekwencji, aby uniknąć nasycenia jądra stojana i wirnika, które spowodowałyby wysoki wzrost prądu magnetyzacji, przepływ φr musi być utrzymywany na stałym poziomie, ponieważ F jest zróżnicowany. Aby to osiągnąć, wynika to z równania.
(9.81) że gdy F jest zróżnicowane, v musi być również zróżnicowane w taki sposób, aby (v / f) pozostało stałe. Zmienny zasilacz (V, F) stałej mocy (V, F) może być zorganizowany przez układ wykładu konwertera ilustrowanego schematycznie na rysunku 9.49 (a), który wykorzystuje obwody SCR. Rysunek 9.49 (b) pokazuje alternatywny schemat kontroli prędkości za pomocą konwertera i silnika prądu stałego (bocznik).

Główną atrakcją wykorzystania silnika indukcyjnego do kontroli prędkości jest jego niezawodność, jego niski koszt i konserwacja bez konserwacji w porównaniu z silnikiem CC.
Ze względu na koszt falownika zaangażowanego w indukcyjny schemat kontroli prędkości silnika, ciągły schemat silnika prądu jest bardziej ekonomiczny.
Jednak schemat silnika indukcyjnego jest solidnym kandydatem do kontroli prędkości i powinien przejąć kontrolę w najbliższej przyszłości dzięki poprawie i zmniejszeniu dodatkowej technologii CCR.