Kontrola prędkości w zamkniętej pętli treningu silnika indukcyjnego:
Kontrola prędkości pętli zamkniętej w szkoleniu silnika indukcyjnego pokazano na rysunku 6.43. Wykorzystuje wewnętrzną pętlę prędkości z przesuwanym ograniczeniem i zewnętrzną pętlą prędkości. Ponieważ dla danego prądu prędkość przesuwna ma stałą wartość, pętla prędkości przesuwnej działa również jako wewnętrzna pętla prądu.
Ponadto gwarantuje również, że operacja silnika zawsze występuje w części krzywej prędkości prędkości między prędkością synchroniczną a maksymalną prędkością momentu obrotowego dla wszystkich częstotliwości, gwarantując w ten sposób wysoki stosunek momentu obrotowego / prądowego.
Czytnik używa falownika PWM odżywionego ze źródła CC, który ma zdolności hamowania regeneracyjnego i działające z czterema ćwiartkami. Schemat napędu ma jednak zastosowanie do każdego gracza VSI lub Cycloconverter z regeneracyjną lub dynamiczną mocą hamowania. Działanie czytelnika wyjaśniono poniżej.
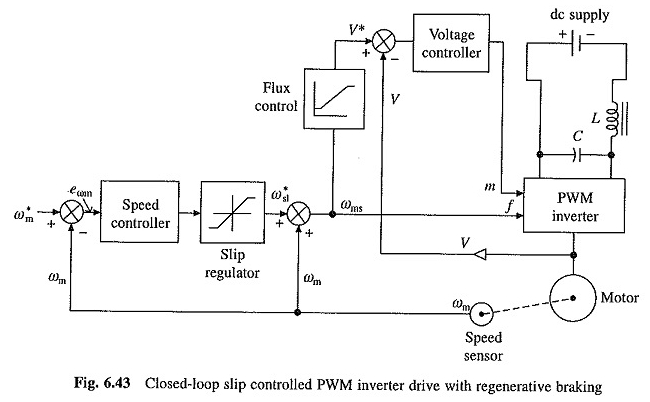
Błąd prędkości jest przetwarzany za pośrednictwem kontrolera PI i przesuwnego regulatora. Kontroler PI służy do uzyskania dobrej precyzji w stanie równowagi i złagodzenia szumu.
Regulator ślizgowy definiuje kontrolę prędkości przesuwnej ω * SL, której maksymalna wartość jest ograniczona do ograniczenia prądu falownika do autoryzowanej wartości. Prędkość synchroniczna, uzyskana przez dodanie rzeczywistej prędkości ωm i prędkości przesuwnej ω * SL, określa częstotliwość falownika.
Sygnał odniesienia do kontroli prędkości pętli zamkniętej silnika indukcyjnego napięcia terminala maszynowego V * jest generowana z częstotliwości F przy użyciu generatora funkcji.
Prawie gwarantuje działanie stałego przepływu do prędkości podstawowej i operacji przy stałym napięciu zacisku powyżej prędkości podstawowej.
Wzrost kroków kontroli prędkości ω * m powoduje błąd dodatniej prędkości. Kontrola prędkości przesuwnej ω * SL jest zdefiniowana o wartości maksymalnej.
Czytelnik przyspiesza maksymalny prąd upoważniony falownika, wytwarzając maksymalny dostępny moment obrotowy, aż błąd prędkości zostanie zmniejszony do niewielkiej wartości. Czytelnik w końcu deformuje się z przesuwaną prędkością, dla której moment obrotowy silnika równoważy moment obrotowy.
Zmniejszenie kontroli prędkości powoduje błąd prędkości ujemnej. Polecenie prędkości poślizgu jest zdefiniowane przy maksymalnej wartości ujemnej.
Czytnik jest zepsuty w ramach hamowania regeneracyjnego, maksymalnego autoryzowanego prądu i maksymalnego dostępnego momentu hamowania, aż błąd prędkości zostanie zmniejszony do niewielkiej wartości.
Teraz operacja przenosi się do motoryzacji, a czytnik jest regulowany z prędkością przesuwaną, dla której moment obrotowy silnika jest równy momentowi obciążenia.
Czytnik ma szybką odpowiedź, ponieważ błąd prędkości jest korygowany dla maksymalnego dostępnego momentu obrotowego. Bezpośrednia kontrola przesuwania zapewnia stabilne działanie we wszystkich warunkach pracy.
W przypadku działania poza podstawową prędkością ograniczenie prędkości przesuwnej regulatora przesuwnego musi zostać zwiększone liniowo wraz z częstotliwością do momentu osiągnięcia wartości rozkładu.
Jest to przeprowadzane przez dodanie do wyjścia regulatora przesuwnego dodatkowego sygnału prędkości przesuwnej, proporcjonalnego do częstotliwości i odpowiedniego znaku.
Dla częstotliwości powyżej częstotliwości, dla której osiągnięty jest moment obrotowy, ograniczenie prędkości przesuwnej jest utrzymywane w pobliżu wartości rozpadu.
Gdy konieczna jest szybka reakcja, maksymalne przesuwanie może być równe SIN, ponieważ silniki indukcyjne mogą być upoważnione do transportu prądu nominalnego kilkakrotnie podczas krótkoterminowych operacji przejściowych.
Falownik i jego przedni konwerter są budowane przy użyciu urządzeń półprzewodników, których wymiary przejściowe i stałe są takie same. Następnie nuty falownika i przedni konwerter muszą zostać wybrane kilkakrotnie prądem silnika.
To znacznie zwiększy koszty zmienności. Gdy szybka reakcja przejściowa nie jest wymagana, prądy falownika i przedniego konwertera mogą być wybrane tak, aby były nieco wyższe niż w silniku.