Kontrola falownika źródła napięcia silnika indukcyjnego:
Zmienna częstotliwość i zmienne zasilacz napięcia do sterowania silnikiem indukcyjnym można uzyskać z napięcia SID (VSI) lub falownika cyklokonweratora. Kontrola falownika źródła napięcia silnika indukcyjnego jest tutaj opisana i szkolenia zasilane przez cyklokonwerter.
Silnik indukcyjny VSI:
Kontrola źródła źródła napięcia silnika indukcyjnego umożliwia uzyskanie zasilania o zmiennej częstotliwości z zasilania prądu stałego. Rysunek 6.37 (a) pokazuje VSI za pomocą tranzystorów. Każde inne samozadowolenie można użyć zamiast tranzystora.
Zasadniczo MOSFET jest stosowany w falownikach o niskim napięciu i niskiej mocy, IGET (tranzystor dwubiegunowy z izolowanymi drzwiami), a tranzystory mocy są używane do średnich poziomów mocy, a GTO (brama obraca tyrystor), a IGCT (tyrystor w izolowanym drzwiach) są używane do wysokiego poziomu mocy.

Kontrola falownika napięcia silnika indukcyjnego może być stosowana jako falownik fali półki lub szerokość impulsu (PWM).
Kiedy działają jako falownik fal rozłożonych, tranzystory są przełączane na sekwencję ich liczby z różnicą czasową T / 6, a każdy tranzystor jest utrzymywany podczas trwania T / 2, gdzie t jest okresem dla cyklu. Powstała fala napięcia linii jest reprezentowana na ryc.
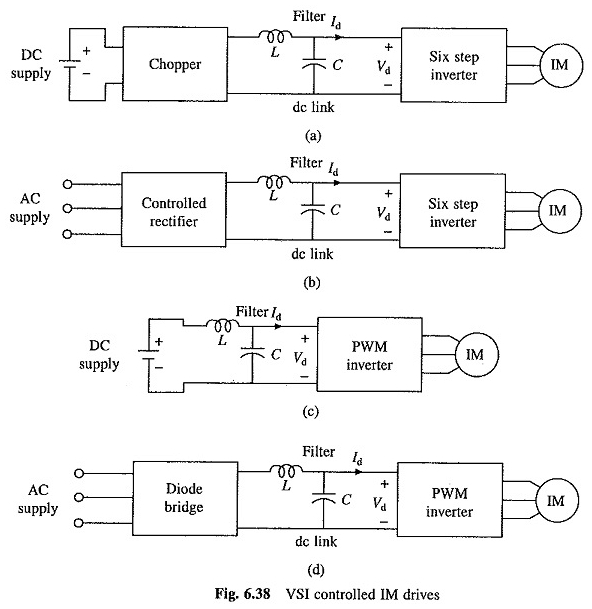
6.37 (b). Częstotliwość obsługi falownika jest zmienna w zależności od T, a napięcie wyjściowe falownika jest zmieniane przez zmienne napięcie wejściowe CC. Gdy zasilacz wynosi DC, zmienne napięcie wejściowe CC jest uzyskiwane przez podłączenie helikoptera między mocą ciągłą a falownikiem (ryc. 6.38 (a)).
Gdy zasilacz jest prądem przemiennym, zmienne napięcie wejściowe CC jest uzyskiwane przez podłączenie kontrolowanego prostownika między zasilaniem prądu przemiennego a falownikiem (ryc. 6.38 (b)).
Duży elektrolityczny kondensator filtra C jest podłączony w łączu DC, aby działać prostownika lub falownika rozsianego i filtrowania harmonicznych w napięciu połączenia DC.
Wyjście i napięcia fazowe falownika są podane przez następującą serię Fouriera:


Wartość RMS podstawowego napięcia fazowego

Moment dla danej prędkości można obliczyć, biorąc pod uwagę tylko podstawowy komponent. Główną wadą wodoodpornego falownika falowego jest duże harmoniczne o niskiej częstotliwości w napięciu wyjściowym.
W związku z tym napęd silnika indukcyjnego z falownika rozprzestrzeniania się cierpi z powodu następujących wad:
- Ze względu na harmoniczne o niskiej częstotliwości straty motoryczne są zwiększane przy wszystkich prędkościach powodujących zwężenie silnika.
- Silnik rozwija pulsujące pary z powodu piątej, siódmej, jedenastej i trzynastej harmonicznej, które powodują gwałtowne ruch wirnika z niską prędkością.
- Zawartość harmoniczna w prądu silnika wzrasta z niską prędkością. Maszyna nasycona lekkimi obciążeniami z niską prędkością ze względu na wysoki stosunek (VLF). Te dwa efekty przegrzają maszynę o niskiej prędkości, ograniczając w ten sposób najniższą prędkość do około 40% podstawowej prędkości.
Harmoniczne są zmniejszone, harmoniczne o niskiej częstotliwości są eliminowane, powiązane straty są zmniejszone, a płynny ruch uzyskuje się przy niskiej prędkości również, gdy falownik jest pracowany jako falownik modulowany przez szerokość impulsu. Figa.
6.37 (c) pokazuje kształt fali napięcia wyjściowego dla modulacji sinusoidalnej szerokości impulsu.
Ponieważ napięcie wyjściowe może być teraz kontrolowane przez modulację szerokości impulsu, nie jest wymagane dostarczanie zmiany napięcia wejściowego CC, falownika można zatem połączyć bezpośrednio, gdy zasilanie wynosi prąd stałowy [ryc. 6.38 (c)] i przez prostownik diodowy, gdy zasilacz jest prądem przemiennym. [Figa. 6.38 (d)].
Podstawowy element napięcia fazy wyjściowej falownika PWM działającego z sinusoidal PWM jest podany przez

Gdzie jest wskaźnik modulacji.
Harmoniczne prądu silnika wytwarzają pulsowanie momentu obrotowego i wymagają silnika. W przypadku zawartości harmonicznej podanej w kontroli terminalu silnika obecne harmoniczne są zmniejszone, gdy silnik ma wyższą indukcyjność upływu, co zmniejsza pulsacje kurczące się i momentu obrotowego.
W związku z tym stosuje się z falownika falownika źródła napięcia silnika indukcyjnego o znacznej indukcyjności wycieków (w porównaniu z zasilaczem zasilania sinusoidalnego).
Hamowanie i wielkowadnijskie działanie treningu motorycznego motorycznego:
Zasilacz w silniku jest podawany przez
![]()
Lub
V = podstawowy element napięcia fazy motorycznej
Wschód = podstawowy element prądu fazowego silnika
Φ = kąt fazowy między V i IS.
Podczas funkcjonowania samochodu φ <90 ° pin jest zatem dodatni, to znaczy przepływy mocy falownika do maszyny. Zmniejszenie częstotliwości sprawia, że prędkość synchroniczna jest niższa niż prędkość wirnika i prędkość względna między sterownikami wirnika a obrotowym polem powietrznym.
To odwraca EMF indukuje wirnik, prąd wirnika i składnik prądu stojana, który równoważy zakręty wirnika wirnika. W związku z tym kąt φ staje się większy niż 90 °, a przepływ mocy jest odwrócony.
Maszyna działa jako zasilacz generatora w falowniku, który z kolei zasila zasilacz w CC, odwracając bieżący identyfikator łącza CC.
Hamowanie regeneracyjne uzyskuje się, gdy moc przepływu z falownika do łącza CC jest używana użytecznie, a hamowanie dynamiczne jest uzyskiwane, gdy jest marnowane w oporze.
Dynamiczne hamowanie:
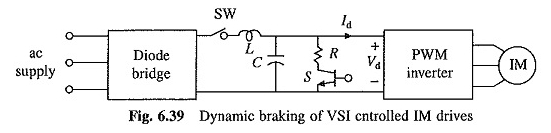
Najpierw rozważmy dynamiczne hamowanie falownika modulowanego przez szerokość impulsu na rysunku 6.38 (d). W przypadku hamowania dynamicznego czytelnik będzie pokazany na rysunku 6.39.
Do dynamicznego hamowania przełącznik SW i automatyczny przełącznik (tutaj tranzystor) w szeregu z rezystancją hamowania RB podłączoną do łącza CC są dodawane do czytnika na rysunku 6.38 (d). Kiedy operacja silnika przeszła z autostrady do przełącznika hamowania, SW jest otwarty.
Wygenerowana energia przepływ w łączu CC ładuje kondensator, a jego napięcia wzrasta. Po przekroczeniu określonej wartości przełącznik został zamknięty, łącząc rezystancję przez łącze.
Wytworzona energia i część energii przechowywanej w kondensatorze wpada do oporu, a napięcie wiązania CC zmniejszone. Kiedy spada do wartości nominalnej, jest otwarty.
Zatem, zamykając i otwierając przełączniki jako funkcję wartości napięcia wiązania CC, generowana energia jest rozpraszana w rezystancji, co daje dynamiczne hamowanie. Dynamiczne działanie hamowania dysków fig. 6.38 (a) do (c) można uzyskać w podobny sposób.
Hamowanie regeneracyjne:
Najpierw rozważmy hamowanie regeneracyjne falownika modulowanego przez szerokość impulsu (PWM) z ryc. 6.38 (c) i (D). W czytelniku RYS. 6.38 (c), gdy obsługa maszyny przechodzi od samochodu do hamowania, ID odwraca i przepływa do energii zasilającego DC u źródła.
Zatem czytelnik na rysunku 6.38 (c) ma już regeneracyjną zdolność hamowania. W przypadku szkolenia na rysunku 6.38 (d), w celu hamowania regeneracyjnego zasilacz do łącza CC musi zostać przeniesiony do zasilania prądu przemiennego.
Gdy operacja przechodzi od samochodu do identyfikatora hamowania, ale VD pozostaje w tym samym kierunku. Zatem dla regeneracyjnej pojemności hamowania konieczny jest konwerter zdolny do zarządzania ciągłym napięciem prądu i prądu CC jednego lub drugiego kierunku.
Podwójny konwerter ma taką pojemność i był używany w przeszłości. Ostatnie dyski używają synchronicznego konwertera łącznikowego (SLC), ponieważ przenosi prąd sinusoidalny do źródłowego współczynnika mocy źródła CA, zarówno podczas operacji jazdy, jak i hamowania.
Zatem, chociaż jego wydajność jest wyższa, wymaga mniej urządzeń niż podwójny konwerter. Zasada jego operacji jest tutaj wyjaśniona.
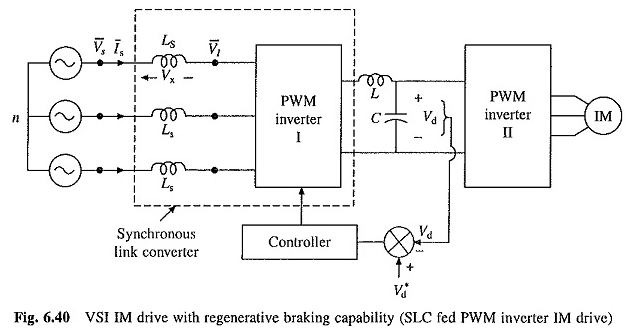
Czytnik regeneracyjny z falownikiem SLC i PWM pokazano na rysunku 6.40. Indukcje LS i PWM, które stanowią SLC.
Falownik PWM służy do wytwarzania napięcia VI amplitudy i wymaganej fazy i niskiej zawartości harmonicznej, tak że prąd źródłowy jest prawie sinusoidalny i w fazie z VS dla autoryzacji i 180 ° z wyłączeniem fazy hamowania, co daje współczynnik mocy jednostki.
Schematy fazowe są reprezentowane na ryc. 6.41 (a) i (b). Dla każdego jest wartością, v1 danej fazy i wielkości jest wymagana. Można to łatwo wykonać w modulacji sinusoidalnej szerokości impulsu (PWM).
W sinusoidalnej i fazie V1 wielkości zależy od amplitudy i fazy sygnału modulacji [1]. W konsekwencji V1 danej fazy i wielkości można wytwarzać poprzez wytworzenie sygnału modyfikacji amplitudy i wymaganej fazy.
Ponieważ VI jest wytwarzane przez falownik PWM, nie zawiera harmonicznych o niskiej częstotliwości. Indukcyjność LS filtruje harmoniczne wysokiej częstotliwości, aby wytworzyć prawie sinusoidalny prąd źródłowy. Schematy fazowe na ryc. 6.41 są podobne do schematów maszyny synchronicznej.
Zatem zachowanie synchronicznego konwertera łącza jest podobne do zachowania maszyny synchronicznej, nazywa się zatem synchronicznym konwerterem łącza.

Gdy czytelnik na ryc. 6.40 działa w równowadze, dostarczona zasilanie (gniazdo) przez SLC musi być równe elektryczności pobranej (dostarczonej) przez falownika PWM II. Ponieważ oba działają niezależnie od siebie, jest to przeprowadzane, zapewniając kontrolę zamkniętej pętli napięcia połączenia CC.
Gdy zasilanie dostarczone przez SLC do łącza CC jest równe mocy pobranej przez falownika PWM II, żadna energia nie zostanie dostarczona ani pobrana z kondensatora C, a jego napięcie będzie stałe i równe wartości odniesienia VD *.
Jeśli teraz obciążenie IM zostanie zwiększone, moc pobierana przez falownik PWM II z łącza DC będzie wyższy niż moc dostarczona przez SLC. Dlatego napięcie kondensatora VD spadnie poniżej jego wartości odniesienia VD *.
Zamknięta kontrola napięcia pętli wzrośnie wartość IS, a zatem zasilanie do łącza DC. W związku z tym napięcie łącza CC zostanie zmniejszone do wartości odniesienia.
Ponieważ SLC działa jako konwerter doładowania, zamknięta kontrola pętli napięcia łącza CC oferuje czytelnikowi pojemność jazdy w stosunku do napięcia i pod napięciem.
Gdy napięcie źródła prądu przemiennego spadnie, kontrola napięcia zamkniętej pętli utrzymuje stałą napięcia wiązania CC przez wzrost IS, a zatem silnik nadal zapewnia stałe napięcie, a zatem wytwarza tę samą moc i maksymalny moment obrotowy.
Czytnik na rysunku 6.38 (b) może mieć regeneracyjną pojemność hamowania poprzez zastąpienie prostownika kontrolowanego przez podwójny konwerter. SLC nie można użyć, ponieważ wymaga stałego napięcia wiązania CC, podczas gdy napięcie łącznika CC z sześcioma etapami musi być zróżnicowane.
Czytnik na rycinie 6.38 (a) będzie miał regeneracyjną pojemność hamowania, jeśli zastosowano dwukodowy helikopter na rycinie 5.44 (zdolny do zapewnienia napięcia polaryzacji i prądu w obu kierunkach).
Działanie czterech ćwiartek:
Działanie czterech kwadrantu można uzyskać za pomocą dowolnego napędu o pojemności hamowania (regeneracyjnej lub dynamicznej). Zmniejszenie częstotliwości falownika, aby prędkość synchroniczna była niższa niż prędkość silnika, przenosi działanie kwadrantu I (samochód do przodu) do II (przednie hamowanie).
Częstotliwość i napięcie falownika są stopniowo zmniejszane, ponieważ prędkość spada, aby spowolnić maszynę do zerowej prędkości.
Teraz sekwencja fazowa napięcia wyjściowego falownika jest odwrócona poprzez wymianę zmęczonych impulsów między dwoma przełącznikami falownika, na przykład między parami (TRL, TR4) i (TR3 i TR6) na rysunku 6.37 (a).
To przenosi operację kwadrantu HI (silnik odwrotny). Częstotliwość i napięcie falownika są zwiększone, aby uzyskać prędkość wymaganą w przeciwnym kierunku.