Napęd silnika indukcyjnego zasilany falownikiem:
Czytnik silnika indukcyjnego podawany w prądu źródło – W falowniku źródłowym napięcie silnik indukcyjny zasilany indukcją, napięcie przyłożone do stojana jest proporcjonalne do częstotliwości, z korektą spadku oporu stojana, w szczególności przy niskiej prędkości, w celu utrzymania stałego przepływu.
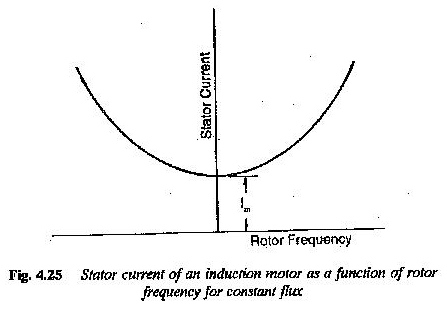
Dobrze znany jest, że prąd narysowany przez silnik indukcyjny nie zależy od częstotliwości stojana, gdy przepływ przestrzeni powietrza jest stały. Istnieje stała zależność między częstotliwością poślizgu a prądem stojana dla przepływu nominalnego w przestrzeni powietrznej, jak pokazano na ryc.
4.25. Kontrolując przesuwanie silnika, prąd stojana można sprawdzić. Dlatego możliwa jest kontrola przepływu pośredniego. Kontrola jest prostsza niż kontrola napięcia. Krzywa między częstotliwością poślizgu a prądem stojana można obliczyć za pomocą obwodu równoważnego. Falownik PWM można sprawdzić, aby zapewnić pożądane prądy w silniku.
W konwerterie wiązań CC, jeśli sprawdzony jest prąd połączenia CC, falownik nazywany jest prądem falownikiem źródłowym. Prąd w łączu CC jest utrzymywany na stałym poziomie przez wysoką indukcyjność, a pojemność filtra jest dystrybuowana.
Zmienne napięcie wiązania CC jest przekształcane w silnik indukcyjny podawany do falownika w źródle prądu za pomocą indukcyjności. Oferta DC ma wielką impedancję.
Ponieważ prąd połączenia jest utrzymywany na stałym poziomie, przebieg prądu wyjściowego jest określany przez działanie falownika, podczas gdy napięcie wyjściowe jest określone przez charakter impedancji obciążenia.
Silnik indukcyjny zasilany bieżącym falownikiem w bieżącym falowniku jest odpowiedni dla obciążeń, które mają niską impedancję z prądami harmonicznymi i ma jednostkę PF
Silnik indukcyjny zasilany bieżącym falownikiem ma bardzo prostą konfigurację. Diody zwrotne nie są wymagane. Z boku linii stosuje się kontrolowany prostownik w fazie, aby zapewnić prąd kontrolną.
Ponieważ łącze CC zawiera jedynie indukcyjność, regeneracja jest możliwa poprzez modyfikację polaryzacji napięć i utrzymanie kierunku prądu. Dlatego czytelnik czterech ćwiartek jest prosty i prosty.
Zapewnia efektywną buforową buforę wyjścia falownika ze zmian napięcia zasilania. Bezpośrednia kontrola prądu stojana umożliwia wdrożenie precyzyjnej kontroli zamkniętej pętli ze względną łatwością.
Przełączanie falownika zależy od obciążenia. Parametry obciążenia są częścią obwodu przełączającego. Dlatego wymagana jest korespondencja między falownikiem a silnikiem. Działanie multimotorowe nie jest możliwe.
Falownik musi być koniecznie powszechną siłą, ponieważ silnik indukcyjny nie może zapewnić mocy reaktywnej falownika.
Stały prąd połączenia CC może przepływać przez fazy silnika poprzez kontrolowanie falownika, a zatem prąd silnika jest falą quasi-karane. Napięcie silnika jest prawie sinusoidalne z punktami piętrowymi z powodu przełączania.
Te szczyty napięcia decydują o ocenie napięcia THVRISTORS, a także wpływają na izolację silnika. Punkty te mogą być ograniczone, jeśli maszyna ma niewielką reaktancję upływu lub jeśli kondensatory komunikacyjne są duże.
Maszyna z mniejszą reaktancją upadku jest odpowiednia do działania silnika indukcyjnego falownika falownika źródła prądu w celu utrzymania pików napięcia i strat harmonicznych. Wpływ pulsacji momentu obrotowego maleje i można zwiększyć częstotliwość roboczą.
Pojemność przełączania jest wybierana do kompromisu między końcówkami napięcia a najwyższą częstotliwością roboczą. Przełączanie wymaga ostatecznego minimalnego prądu. Falownik ma możliwość odzyskania po awarii przełączania.
Indukcyjność połączenia powoduje powolny wzrost prądu uszkodzenia, a gdy osiągnie wysokie wartości, wadę można wyeliminować.
Czytelnik stwarza problemy ze stabilnością przy lekkich obciążeniach. Działanie otwartej pętli nie jest możliwe. Ma bardzo szeroki zakres kontroli prędkości, ale dynamiczna wydajność jest słaba.
Silnik napędowy wymaga zwężenia ze względu na straty harmoniczne i powiązane ogrzewanie. Pulsacje momentu obrotowego są obecne, a ich amplituda jest duża przy niskiej częstotliwości działania, ze względu na dodatkowe harmoniczne w przepływie wirnika. Współczynnik mocy linii jest słaby z powodu kontroli faz.
Aż do częstotliwości nominalnej czytelnik jest w trybie stałego momentu obrotowego i powyżej nominalnej częstotliwości, w której czytelnik jest w trybie stałej mocy koni.
Prąd stojany silnika indukcyjnego działającego na zmiennej częstotliwości, zmienne zasilanie napięcia jest niezależne od częstotliwości stojana, jeśli przepływ kształtu powietrza jest utrzymywany stałym. Zależy to jednak od częstotliwości wirnika.
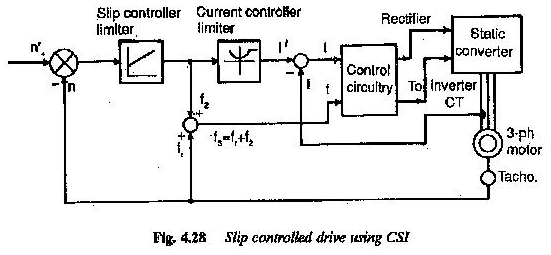
Rozwinięty moment obrotowy zależy również od częstotliwości wirnika. Korzystając z tych cech, można opracować przesuwany czytnik kontrolowany (ryc. 4.28) przy użyciu prądu falownika źródłowego w celu dostarczenia silnika indukcyjnego.
Zależność między częstotliwością wirnika a prądem stojana dla przepływu nominalnego w aerogapie jest wprowadzana do kontroli. Zatem możliwa jest pośrednia kontrola przepływu. Wylot generatora funkcji podaje wartość odniesienia prądu.
Zmierzony prąd jest porównywany z wartością odniesienia, a błąd jest używany do modyfikacji kąta strzelania przetwornika sprawdzonego z boku linii.
Wejście generatora funkcji jest różnica między prędkością odniesienia a rzeczywistą prędkość i można ją uznać za częstotliwość przesuwną, która jest dodawana do częstotliwości odpowiadającej prędkości wirnika, która daje wartość częstotliwości stojana, a falownik po stronie maszyny jest kontrolowany, aby zapewnić tę częstotliwość.
Kontrola działa, dopóki wirnik nie osiągnie pożądanej prędkości z wymaganą częstotliwością przesuwną.
Czytelnik kontrolowany przez Slide przedstawia następujące zalety:
1. Kontrolowany czytnik poślizgu jest bardzo skuteczny.
2. Dokładna kontrola momentu obrotowego jest możliwa w szerokim zakresie prędkości.
3. Częstotliwość przesuwana może mieć dowolną wartość do wartości odpowiadającej momentowi awarii. Operacja jest bardzo dobrym współczynnikiem mocy. Operacja jest bardzo stabilna.
4. Rotor można przyspieszyć do stałego i poinformowanego momentu obrotowego, utrzymując częstotliwość wirnika o odpowiedniej wartości. Szybkie przyspieszenie.
5.com, że prowadzi to do miękkiego startu, w którym silnik nie widzi blokowanych prądów wirnika i nie ma powiązanych pośladków napięcia.
6. Specjalne wirniki o wysokim momencie początkowym nie są konieczne. Można zastosować wirniki o niskiej oporności, aby straty były ograniczone.
7. Można włączyć hamowanie regeneracyjne. Możliwe jest hamowanie do stałego momentu obrotowego.
8. Czytelnik ma wydajność porównywalną z tyrystoryzowanym odtwarzaczem CC.
Dodatkowe zalety silników indukcyjnych klatki wiewiórki, takie jak wysoki stosunek mocy / masy, mniej konserwacji, niska bezwładność, bez ograniczeń w zakresie zasilania i zakresów prędkości, sprawiają, że poślizg kontrolował krążek prawdziwy konkurent dla czytników silników DC.
Wybrane metody eliminacji harmonicznej lub zasady PWM można zastosować w celu zmniejszenia skutków impulsów momentu obrotowego, szczególnie przy niskiej prędkości.
W tych metodach kontrolę można uzyskać, kontrolując prąd połączenia CC, a zasadę PWM może być następnie używana tylko do kontrolowania zawartości harmonicznej kształtu fali bieżącego.
To oddzielenie funkcji kontroli prądu i harmonicznych pozwala na wybór strategii kontroli PWM, która poprawi jedynie pulsacje momentu obrotowego silnika i zmniejszy straty harmoniczne.
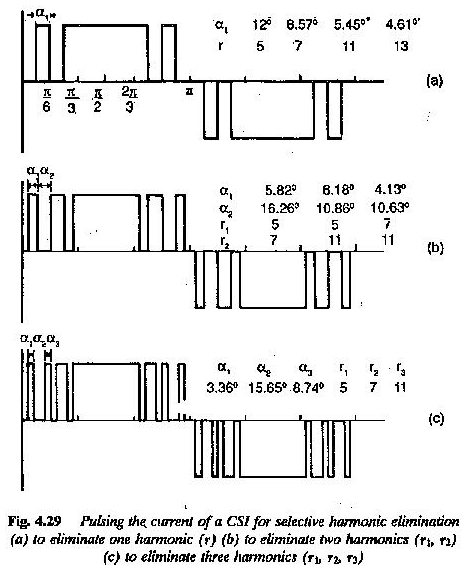
Większość strategii PWM dla silnika indukcyjnego w obecnym falowniku źródłowym oparta jest na wybranych technikach eliminacji harmonicznej.
Służą one do wyeliminowania harmonicznych stanu prądu stojana, a metody powodują eliminację fal dolnego momentu obrotowego (ryc. 4.29).
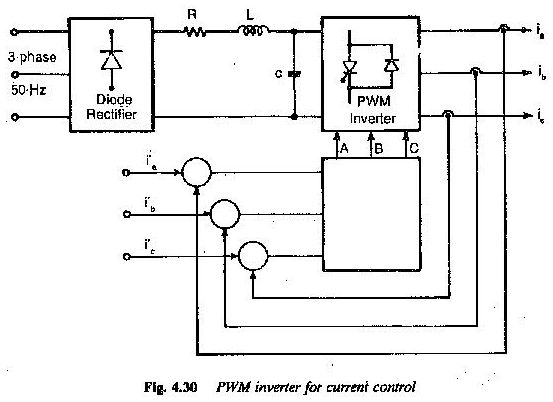
W ostatnich latach opracowano strategie PWM w celu zminimalizowania rozkładu prędkości rzeki z powodu pulsacji momentu obrotowego, aby spowodować trening z gładkim obrotem przy niskiej prędkości (ryc. 4.30).
Ogólne cechy silnika indukcyjnego odżywanego falownikiem obecnego falownika można podsumować w następujący sposób:
1. Przełączanie zależne od pobierania: ponieważ parametry obciążenia są częścią obwodu przełączającego, falownika i silnik muszą być pojawiające się.
2. Falator ma prostą konfigurację. FWD są nieobecne.
3. Unikalna operacja silnika
4. Link CC zawiera tylko indukcyjność. Aby utrzymać stały prąd, musi to być bardzo ważne. Działanie dwóch kwadrantów jest proste
5. Zwiększ, z boku linii wymagany jest kontrolowany prostownik w fazie. Zmienne napięcie wiązania CC jest przekształcane w stałe źródło prądu za pomocą wysokiej indukcyjności wiązania.
6. falownik jest przymusowy, aby zapewnić prądy o zmiennej częstotliwości do zasilania silnika.
7. Wartość pojemności jest kompromisem między pikami napięcia a najwyższą częstotliwością roboczą. Pojemność jest większa, napięcie jest mniejsze, najwyższa częstotliwość robocza jest również ograniczona.
8. Reaktancja wycieków silnika wpływa na napięcia harmoniczne. Jest także odpowiedzialny za szczyty napięcia podczas przełączania.
Reaktancja wycieków jest parametrem obwodu przełączającego, określa czas przełączania, a zatem wyższa częstotliwość operacyjna jest ograniczona.
Silnik musi mieć mniejszą reaktancję upływu, aby zmniejszyć napięcia harmoniczne i piki napięcia oraz zwiększyć zakres kontroli prędkości. Piki wpływają na ocenę tyrystora i wpływają na izolację. Rozmiar silnika staje się większy, jeśli reaktancja wycieków jest niewielka.
9. Jakość konwertera są wystarczające. Użycie tyrystora jest dobre
10. Landery odzyskują po awarii przełączania. Indukcyjność połączenia powoduje powolny wzrost prądu uszkodzenia, a gdy osiąga wysoką wartość, można ją usunąć.
11. Jest to problem z lekką stabilnością obciążenia. Minimalny prąd powinien być na zmianę.
12. Funkcje pętli roboczej nie są możliwe. Dynamiczna odpowiedź jest powolna
13. Linia PF jest mierna z powodu kontroli faz.
14. Zastanawiaj aplikację jako średnio do wysokiego treningu
15. Impulsy powodują oscylacje prędkości przy bardzo niskich prędkościach. Strategie PWM służą do usuwania oscylacji prędkości i sprawnego działania.
16. że możliwe są stały moment obrotowy i operacje mocy stałych koni.