Równoważny obwód silnika indukcyjnego:
Równoważny obwód silnika indukcyjnego – Zachowanie maszyny indukcyjnej zostało zbadane pod względem podstawowego zjawiska w terenie. Próba tutaj celowo skoncentrowała się na analogii transformatora silnika indukcyjnego. Pewne fakty ustalone do tej pory podsumowano poniżej:
1 i 1

gdzie E2 = wirnik wyroku EMF.
Ponadto I’2 przepływa do dodatni terminal E1 i I2 przepływa z dodatni terminal E2. Ponadto I2, jak pokazuje stojan, jest prąd częstotliwości stojana F i jest zgodny z 2, składnikiem prądu narysowanego przez stojana w celu zrównoważenia wirnika MMF F2.
2. Podobnie jak w transformatorze, komponent prądu magnetyzującego IM prądu stojana opóźnia się za EMF indukowanym przez stojana E1 90 °.
3. Silnik indukcyjny to nie tylko transformator, który zmienia napięcie i poziomy prądowe. W rzeczywistości zachowuje się jako uogólniony transformator, w którym częstotliwość jest również przekształcana w proporcję do zjeżdżalni, tak aby EMF indukuje przez wirnik SE2, a reaktancja wirnika wynosi SX2.
Obwód równoważny silnika indukcyjnego może być teraz narysowany przez fazę, jak na rycinie 9.7 (a), w której elementy serii (zgrupowane) odporności stojana i reaktancja wycieków zostały uwzględnione w modelu.
Transformator łączący obwody stojana i wirnika jest idealnym ogólnym transformatorem, w którym napięcie wirnika stopnia E2 i prąd wirnika I2 są połączone z ilościami stojana poprzez stosunek transformacji A, podczas gdy parametr częstotliwości pojawia się w obwodzie wirnika przez ściąganie S, parametrem mechanicznym. Mechaniczna moc wyjściowa pojawia się na drzewie wskazanym na rysunku.
Obwód wirnika może być skierowany do strony stojana za pomocą procesu dwustopniowego modyfikującego obwód wirnika, tak aby stosunek obrotu stał się jednostką, a następnie przeprowadzać transformację częstotliwości, która wynika z obwodu wirnika równoważnego częstotliwości stojana.
Poprzez mnożenie napięcia wirnika przez a i prąd wirnika przez 1 / a, impedancja wirnika jest modyfikowana dla

W tej transformacji moc pozostaje niezmienna. Obwód wirnika, po przeprowadzeniu tego kroku, jest rysowany na rysunku 9.7 (b). Zmniejsza to wirnik do równoważnego wirnika ze stosunkiem obrotu jednostkowego z stojanem.
Z obwodu wirnika równoważnego z rysunkiem 9.7 (b)

Podziel zarówno licznik, jak i mianownik przez S

Ta prosta wskazówka odnosi się do obwodu wirnika na częstotliwości stojana. Zmodyfikowany obwód wirnika jest teraz rysowany na rysunku 9.7 (c), w którym obwód wirnika i stojana ma tę samą częstotliwość, idealny transformator jest obecnie stacjonarnym transformatorem jednostki.
Zauważa się również, że poprzez odniesienie obwodu wirnika do częstotliwości stojana reaktancja staje się stała (X’2), a rezystancja staje się zmienna (R’2 / s). Transformacja równania. (9.15b) nie jest niezmienną mocą (zmiany napięcia, podczas gdy prąd pozostaje taki sam).
Moc przeniesiona do szkoły średniej wyjaśnia teraz zarówno utratę miedzi wirnika, jak i moc mechaniczną (w postaci elektrycznej). Kontrastuje to z rysunkiem 9.7 (a), gdzie moc mechaniczna jest usuwana przez drzewo.
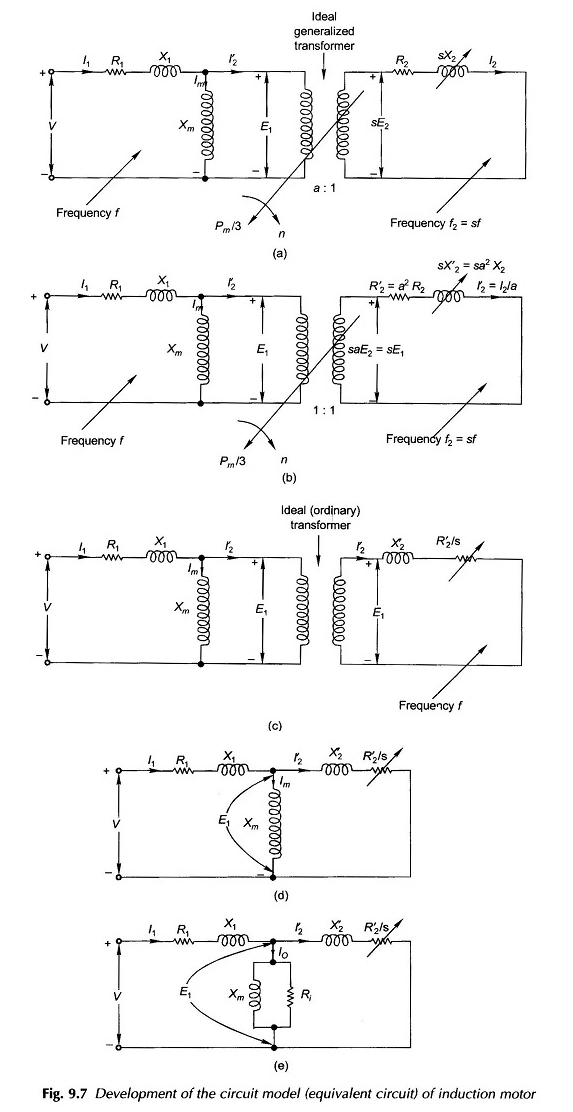
Na ostatnim etapie rozwoju równoważnych obwodów silnika indukcyjnego idealny transformator współczynnika jednostki (zwykły) może być teraz wyposażony w model obwodu na rysunku 9.7 (d).
Reprezentację utraty żelaza w stojanie można wprowadzić heurystycznie do modelu obwodu na rycinie 9.7 (d), umieszczając RI RI równolegle z XM jak w modelu obwodu transformatora. Ten obwód równoważny silnika indukcyjnego jest zaprojektowany na rycinie 9.7 (e).
Jeśli R’2, jest oddzielony od R’2 / s w celu przedstawienia utraty miedzi wirnika jako odrębnego bytu, model obwodu można narysować jak na rysunku 9.8 (a), w którym zmienna rezystancja R’2 (1 / s – 1) reprezentuje mechaniczne wyjście w postaci elektrycznej. Alternatywnie, model obwodu z FIG.
Można zastosować 9.8 (b) (odpowiada to ryc. 9.7 (d), w którym pomijany jest opór na utratę żelaza LA, a strata ta została odejmowana od wyjściowej mechanicznej brutto (moc pochłonięta przez R’2 (1 / s – 1)).
Jest to równoważne z pewnymi przybliżeniami, które są całkowicie akceptowalne w normalnym zakresie przesuwanym w silniku indukcyjnym. Ponadto parametry tego obwodu (które nie wymagają wartości RI) można łatwo uzyskać za pomocą dwóch testów nieładnych.
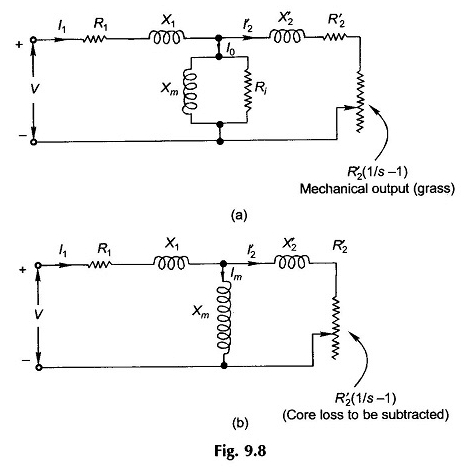
Model obwodu na rycinie 9.8 (b) byłby używany dla większości następujących dyskusji. Możemy tutaj zauważyć, że moc rozproszona w R’2 (1 / s – 1) obejmuje podstawową stratę, którą należy odjąć w celu uzyskania mocy mechanicznej brutto.
Aby uzyskać wyraźną moc mechaniczną, utrata wiatru i tarcia muszą być bardziej odejmowane. Podstawowa utrata i utrata wiatru i utrata tarcia są pogrupowane jako utrata rotacji, ponieważ te dwie straty występują podczas działania silnika.
Utrata obrotu w silniku indukcyjnym jest znacznie stała do stałego zastosowanego napięcia, a prędkość silnika różni się bardzo niewiele od pełnego obciążenia przy pełnym obciążeniu.
Uwaga: Moc mechaniczna netto = moc drzewa