Rozpoczęcie treningu motorycznego indukcyjnego:
Rozpoczęcie układu indukcyjnego treningu silnika jest wybierane zgodnie z wymaganiami obciążenia i charakterem zasilania (niskie lub sztywne). Może być konieczne posiadanie następujących funkcji:
- Silnik musi rozwinąć wystarczającą liczbę momentu początkowego, aby przezwyciężyć tarcia, obciążenie obciążenia i bezwładność układu obciążenia silnika, a tym samym ukończyć proces początkowego w określonym czasie.
- Amplituda prądu początkowego musi być taka, że nie powoduje przegrzania maszyny i nie powoduje spadku napięcia źródłowego poza autoryzowaną wartością.
Zwykle silnik przyciąga od 5 do 7 razy więcej nominalnego prądu podczas rozpoczęcia.
Gdy moment obciążenia podczas uruchamiania i bezwładność obciążenia silnika nie jest ważna, rozpoczęcie procesu treningu silnika indukcyjnego jest zakończone w ciągu kilku sekund, a zatem temperatura silnika nie przekracza autoryzowanej wartości.
W takich aplikacjach silnik może być zawsze uruchamiany bezpośrednio online, pod warunkiem, że spadek napięcia spowodowany dużym prądem początkowym nie wykracza poza wartość autoryzowaną. W przypadku małych silników spadek napięcia w rurze zasilania jest ogólnie poniżej dopuszczalnego poziomu.
Gdy silnik jest o dużej pojemności i / lub odżywiony z niskiego systemu, pewne urządzenie początkowe staje się konieczne w celu zmniejszenia prądu początkowego. W tych zastosowaniach nie ma znaczenia, czy zmniejszeniu prądu początkowego towarzyszy zmniejszenie momentu początkowego.
Gdy moment obciążenia podczas uruchamiania jest wysoki lub bezwładność obciążenia jest ważna, rozpoczęcie procesu treningu silnika indukcyjnego zajmuje dużo czasu. Jeśli silnik przenosi znaczący prąd podczas rozpoczęcia, zostanie uszkodzony z powodu przegrzania. Dlatego silnika nie można uruchomić bezpośrednio online.
W takich przypadkach stosowane są metody uruchomienia, które umożliwiają zmniejszenie prądu początkowego bez zmniejszenia momentu początkowego. W niektórych zastosowaniach konieczne może być wzrost momentu początkowego, któremu towarzyszy spadek prądu początkowego.
W silniku klatki wiewiórek niektóre pomiary poprawy wydajności początkowej mogą. Zakładaj się na stadionie projektowym, jak w przypadku silników klatki wiewiórkowej oraz głębokiego paska i podwójnej klatki. W razie potrzeby metody stosowane do uruchamiania silników w klatce wiewiórki to:
- Starta Star-Delta
- Automatyczny starter transformatora
- Starter reaktora
- Starter reaktora nasycenia
- Część częściowo
- Starter kontrolera napięcia prądu przemiennego
- Rozrusznik oporności na wirnik służy do uruchamiania silnika wirnika:
Metody (1) – (5) i (7) opisano tutaj oraz metodę (6) w suchym. 6.11.
Starta Star-Delta:

W tej metodzie silnik indukcyjny zaprojektowany do normalnego działania z połączeniem Delta jest podłączony jako gwiazda podczas rozpoczęcia. Zmniejsza to napięcie stojana i prąd o 1 / √3.
Ponieważ moment obrotowy silnika jest proporcjonalny do kwadratu napięcia stojaka zaciskowego, moment początkowy jest zmniejszony do strony trzeciej. Obwód uruchomienia gwiazd-delta ilustruje się na rysunku 6.7. Wyłączniki CBM i CD są zamknięte, aby uruchomić maszynę z połączeniem gwiazd. Po osiągnięciu stałej prędkości prędkości CBS jest otwarty, a CBR jest zamknięty w celu podłączenia maszyny w delcie.
Automatyczny starter transformatora:
Zmniejszone napięcie do rozpoczęcia można również uzyskać z automatycznego transformatora. Dla wtórnego zakrętu w obrotu pierwotnym napięcie zaciskowe silnika i prąd stojana są zmniejszone o. Zmniejsza to prąd pobrany z zasilania przez A2T.
Ponieważ moment obrotowy jest proporcjonalny do kwadratu napięcia zacisku silnika, jest również zmniejszony przez A2T. Po przyspieszeniu silnika jest on podłączony do pełnego napięcia mocy. Automatyczny obwód rozruchowy transformatora pokazano na rysunku 6.8 (a). Po pierwsze, CBS1 jest zamknięty, a następnie CBS2.
Gdy silnik przyspieszył z pełną prędkością, CBS2 jest otwarty i CBM zamknięty. CBS1 jest teraz otwarty, aby odłączyć samozadowolenie żywności.
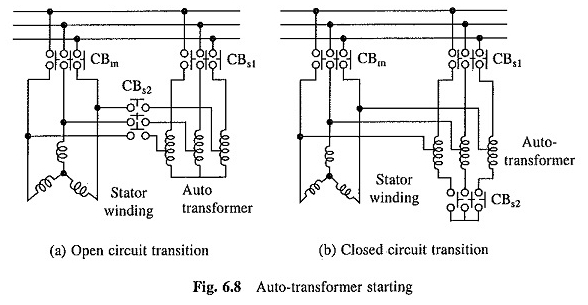
Przejście obwodu zamkniętego:
W metodach uruchamiania Star-Delta i samookformatory, przejście od niskiego napięcia do połączenia pełnego napięcia zakłóca przepływ prądu stojana i pole stojanowe zapada się. Prąd wirnika nadal płynie ze względu na jego duży stały czas.
Pole wytwarzane przez prądy wirnika indukuje napięcia w uzwojeniach stojana. Indukowana faza napięcia jest niezależna od napięć zasilających. Duży prąd prądu jest wytwarzany w momencie ponownego połączenia po indukowaniu, a napięcia zasilania są poza fazą.
Gdy prąd prąd jest nie do przyjęcia, stosuje się przejście obwodu zamkniętego. Schemat przejściowy obwodu zamkniętego dla automatycznego startera transformatora pokazano na rysunku 6.8 (b). Używa trzech wyłączników: CBS1, CBS2 i CBM.
Pierwszy CBS2 jest zamknięty w celu zamknięcia połączenia Star Point Self-Transformator. CBS1 jest później zamknięty. To uzupełnia połączenie niskiego napięcia samozadowolenia i silnika uruchamia się. Po osiągnięciu prędkości obwód obwodu CBS2 jest otwarty.
Silnik działa teraz z górną częścią automatycznych uzwojeń fazowych transformatorów szeregowo z stojanem. Uzwojenia działają po prostu jako reaktory szeregowe. Odtąd CBM wyłącznika jest zamknięty, który omija reaktory serii i łączy silnik bezpośrednio z zasilaczem.
Na początku rozpoczęcia na przemian pierwszy CBS1 jest zamknięty zamiast CBS2. Następnie silnik i transformator nie wytworzą jednocześnie przepięcia prądu magnetyzacyjnego.
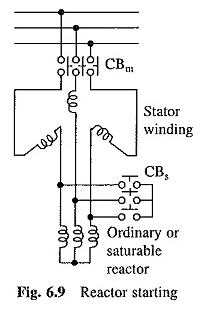
Starter reaktora:
Prąd start -up można również zmniejszyć, podłączając trzy -fazowy reaktor szeregowo z stojanem.
Gdy silnik osiągnie pełną prędkość, reaktor jest omijany. Rysunek 6.9 pokazał taki schemat. CBM jest zamknięty, aby uruchomić maszynę. Po osiągnięciu pełnej prędkości CBS jest zamknięty w celu zwarcia reaktora. Korzystne jest podłączenie reaktora z neutralnym końcem uzwojenia stojana.
Minimalizuje to ocenę napięcia, a także utrzymuje napięcie i napięcie CBS wyłącznika z potencjałem neutralnym podczas działania normalnego silnika.
Rozpoczęcie miękkiego użycia reaktora Satubble:
W niektórych aplikacjach początkowy moment obrotowy należy sprawdzić bez kroku. Na przykład w maszynach tekstylnych musi być delikatnie zróżnicowana, w przeciwnym razie przewody światłowodowe pękną podczas rozpoczęcia. Taki układ początkowy nazywa się gładkim startem -up.
Schemat kontrolera napięcia tyrystorowego jest teraz szeroko stosowany do rozpoczęcia. Pewna liczba istniejących dysków wykorzystuje również starter reaktora sobocznego, w którym trzyprzewodniowy reaktor soboczny jest połączony szeregowo z stojanem. Reaktor nasycenia ma uzwojenie kontrolne DC.
Reaktancję reaktora satubble można zmieniać bez kroku poprzez modyfikację prądu uzwojenia kontrolnego. W celu rozpoczęcia reaktancja jest początkowo zdefiniowana na najwyższą wartość. Moment startowy jest bliski zerowej. Reaktancja jest teraz płynnie zmniejszona poprzez zwiększenie prądu uzwojenia kontrolnego.
Daje to zmianę bez etapu początkowego momentu obrotowego. Dlatego silnik zaczyna się bez odciągania i delikatnego przyspieszania.
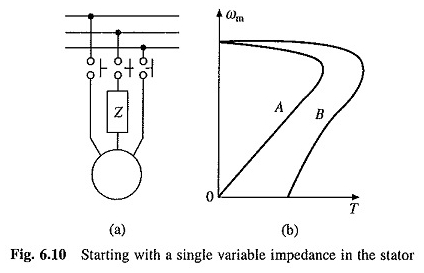
Niezrównoważony schemat start -up dla elastycznego start:
W celu uruchomienia bez funkcji można również zastosować tańszą alternatywę pokazaną na rysunku 6.10 (a). Składa się ze zmiennej impedancji Z w jednej z faz maszyny.
Gdy impedancja jest bardzo wysoka, maszyna działa z pojedynczym fazowaniem, a jej charakterystyka prędkości jest podobna do charakterystyki na rysunku 6.10 (b), z zerowym momentem początkowym.
Gdy impedancja jest całkowicie usunięta, krzywa momentu obrotowego prędkości jest podobna do charakterystyki B, która jest naturalną cechą maszyny. W przypadku wartości impedancji pośrednich krzywa prędkości prędkości znajduje się między krzywymi A i B.
Start płynowy, bez szoku, jest osiągany, gdy impedancja jest kontrolowana bez kroku. Impedancja może być zmiennym rezystancją lub jednofazowym reaktorem sobotnym.
Silnik współpracuje z niezrównoważonymi napięciami stojan, dlatego straty miedzi rosną. Zatem ten schemat jest odpowiedni tylko do krótkiej operacji.
Początek uzwojenia części:
Niektóre silniki klatki wiewiórki mają dwa lub więcej uzwojeń stojana, które są połączone równolegle podczas normalnej operacji. Początkowo połączone jest pojedyncze uzwojenie. Zwiększa to impedancję stojana i zmniejsza prąd początkowy. Taki początkowy schemat nazywa się początkiem gry.
Jego implementacja maszyny z dwoma uzwojeniami stojana ilustruje się na rysunku 6.11. Maszyna zaczyna się od uzwojenia 1, gdy CBM jest zamknięty. Po zakończeniu prędkości CBS jest zamknięty w celu podłączenia uzwojenia 2.

Rozrusznik oporu wirnika:
Silniki wirnikowe ran są na ogół rozpoczynające się przez połączenie rezystorów zewnętrznych w obwodzie wirnika (ryc. 6.12 (a)). Najwyższa wartość rezystancyjna jest wybierana w celu ograniczenia prądu do zerowej prędkości w bezpiecznym zakładach.
Gdy silnik przyspiesza, sekcje oporu zewnętrznego są przecinane jeden po jednym poprzez zamknięcie styków C1, C2 i C3 w celu ograniczenia prądu wirnika między wartościami maksymalnymi i minimalnymi (ryc. 6.12 (b)).

Ponieważ większość utraty miedzi wirnika występuje w rezystancji zewnętrznej, wzrost temperatury wirnika podczas uruchamiania -up jest znacznie niższy w porównaniu z metodami początkowymi opisanymi powyżej.
Ważną cechą tej metody początkowej silnika indukcyjnego jest to, że początkowy moment obrotowy i współczynnik momentu obrotowego / prądu są wysoki.
Dlatego nadaje się do zastosowań wymagających szybkiego przyspieszenia, odlotów i częstych przystanków, zaczynając od intensywnego obciążenia i zaczynając od dużego obciążenia bezwładności.
Podczas gdy maksymalny moment obrotowy jest niezależny od wartości rezystancji wirnika (równ. (6.13)), prędkość, z jaką wytwarzany jest maksymalny moment obrotowy, można kontrolować poprzez modyfikację wartości rezystorów zewnętrznych (równ. (6.12)). Zewnętrzne rezystory można zatem zmieniać, aby przyspieszyć maszynę maksymalnym momentem obrotowym.