Schemat odzyskiwania mocy zastosowany w silniku indukcyjnym:
Schemat odzyskiwania zasilania przesuwnego zastosowany w silniku indukcyjnym – Rysunek 6.53 pokazuje równoważny obwód silnika indukcyjnego wirnika rannego z napięciem VR wstrzykniętym do jego wirnika, zakładając, że stosunek stojana -drocznika. Gdy utrata miedzi wirnika zostanie zaniedbana
![]()
gdzie PR jest mocą pochłoniętą przez źródło VR. Amplitudę i znak PR można kontrolować poprzez kontrolowanie wielkości i fazy VR. Gdy PR wynosi zero, silnik działa w swojej charakterystyce dla naturalnego momentu obrotowego prędkości.
Dodatni PR zmniejszy PMS, a zatem silnik będzie działał z niższą prędkością dla tego samego momentu obrotowego. Gdy PR jest równe PG, PM, a zatem prędkość wyniesie zero. Zatem zmienność PR od 0 do PG pozwoli na prędkość prędkości synchronicznej przy prędkości zerowej. Polaryzacja VR dla tej operacji jest reprezentowana na rysunku 6.53 przez linię ciągłą.
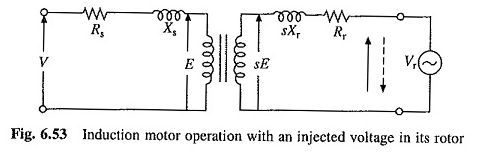
Gdy PR jest ujemny, IE VR działa jako źródło zasilania, PM będzie większy niż PG, a silnik będzie działał z prędkością wyższą niż prędkość synchroniczna. Polaryzacja VR dla kontroli prędkości powyżej prędkości synchronicznej jest reprezentowana przez linię kropkowaną na rysunku 6.53.
Po zaniedbaniu utraty miedzi wirnika PR jest równy schematu odzyskiwania mocy przesuwnej zastosowanej w silniku indukcyjnym, SPG. Kontrola prędkości poniżej szybkości synchronicznej uzyskuje się poprzez kontrolowanie mocy przesuwnej. To samo podejście zostało przyjęte w kontroli odporności na wirnik.
Jednak zamiast marnować energię w opornościach zewnętrznych, jest on tutaj użyty. W związku z tym te metody kontroli prędkości są klasyfikowane jako schemat odzyskiwania mocy przesuwnej stosowany we wzorach odzyskiwania silnika indukcyjnego. Opisano tutaj dwa z tych wzorów, statyczny trening Sherbius i Kramera.
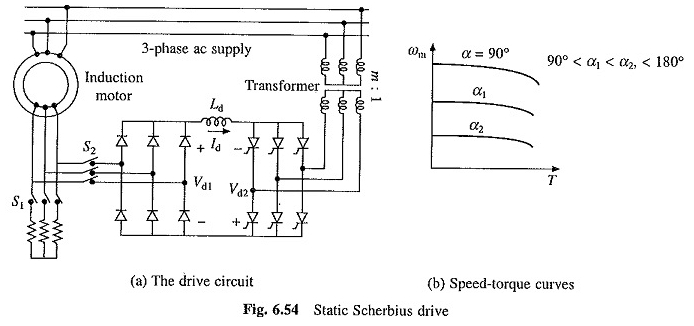
Napęd de Scherbius statyczny (ryc. 6.54 (a)):
Zapewnia kontrolę prędkości silnika wirnika rannego pod prędkością synchroniczną. Część mocy prądu przemiennego wirnika jest przekształcana w CC przez most diodowy. Kontrolowany prostownik działający jako falownik przekształca go w AC i zwraca do źródła prądu przemiennego. Moc została zwrócona (to znaczy
PR) można sprawdzić, kontrolując licznik falownika EMF VD2, który z kolei jest kontrolerem poprzez kontrolowanie kąta napinacza. Indukcyjność wiązań CC jest dostarczana w celu zmniejszenia tętnienia w bieżącym łącze CC.
Ponieważ do źródła podaje się schemat odzyskiwania mocy ślizgowej zastosowanej w silniku indukcyjnym, w przeciwieństwie do kontroli odporności na wirnik, w którym jest marnowany w oporności, jazda ma wysoką wydajność.
Czytnik ma wyższą wydajność niż kontrola napięcia stojana przez kontrolery napięcia prądu przemiennego z tych samych powodów.
Zasilacz wejściowy jazdy to różnica między mocą wejściową silnika a zasilaniem zwracanym. Reaktywna moc wejściowa jest sumą mocy reaktywnych silnika i falownika. Dlatego dysk ma zły współczynnik mocy na plaży swojej działalności.
Na rysunku 6.54 (a), zaniedbanie stojana i kropli wirnika

Gdzie α jest kątem fotografowania falownika i, N i M są odpowiednio stosunkiem stojana / wirnika z turami silnika i strony źródła z konwerterem zakrętów na transformatorze. Zaniedbuj upadek przez cewkę
![]()
Zastępowanie równań. (6.93) i (6.94)

gdzie a = n / m.
Maksymalna wartość α jest ograniczona do 165 ° dla bezpiecznego przełączania tyrystorów falownika. Przesunięcie można sprawdzić od 0 do 0,966a, gdy α wzrosło z 90 do 165 °. Według odpowiedniego wyboru A można uzyskać wymagany zakres prędkości.
Transformator służy do odpowiadania napięciom VD1 i VD2. Przy najniższej prędkości czytnika VD1 będzie miał maksymalną wartość VD1M podaną przez
![]()
gdzie SMAX jest wartością ślizgania się z najniższą prędkością. Jeśli α jest ograniczone do 165 °, M jest wybierane w taki sposób, że napięcie falownika ma wartość VD1M, gdy α wynosi 165 ° IE

Taki wybór M zapewnia funkcjonowanie falownika przy najwyższym kącie strzelania przy najniższej prędkości silnika, dając najwyższy współczynnik mocy (równ. (5.109)) i najniższą moc reaktywną przy najniższej prędkości.
Poprawia to współczynnik mocy w rurze i zmniejsza moc reaktywną do wszystkich prędkości zakresu prędkości czytnika.
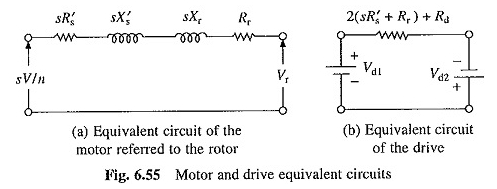
Rysunek 6.55 (a) pokazuje równoważny obwód silnika skierowany do wirnika, zaniedbując gałąź magnesowania. Wyprowadzenie równania. (6.90) pokazuje, że po odniesieniu do łącza DC oporność (SR + RR) wynosi 2 (SR + RR). Daje to równoważny obwód CC około czytelnika (ryc.
6.55 (b)), gdzie VD1 i VD2 podano w równaniach. (6.93) i (6.94). RD to opór indukcyjności połączenia DC. Równoważny obwód ignoruje przełączanie przez most diody. TERAZ

Jeśli utrata miedzi wirnika zostanie zaniedbana
Charakter krzywych momentu obrotowego prędkości przedstawiono na rysunku 6.54 (6).
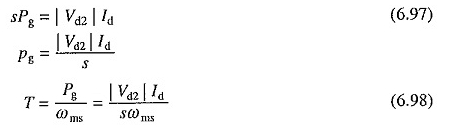
Czytnik ma zastosowania w dyskach wentylatora i pompę wymagającą kontroli prędkości tylko w wąskim zakresie. Jeśli maksymalne przesuwanie jest oznaczone SMAX, wówczas oceny mocy mostu diodowego, falownik i transformator mogą być po prostu czasami mocy silnika (równ. 6.97).
Na przykład, gdy prędkość musi zostać zmniejszona poniżej prędkości synchronicznej o zaledwie 20%, oceny mocy mostu diodowego, falownika i transformatora wyniesie tylko 20% mocy silnika. Dlatego napęd ma niski koszt.
Czytelnik rozpoczyna się od kontrolowania rezystancji za pomocą S1 zamkniętego i otwartego S2 (ryc. 6.54). Gdy prędkość osiągnie zakres sterowania czytnika, S2 jest zamknięty w celu podłączenia mostu diodowego i aktywowanego falownika. Teraz S1 jest otwarty, aby wyeliminować opór.
W fanach i szkoleniu pompy hamowanie nie jest konieczne, ponieważ ciśnienie w płynie zapewnia odpowiedni moment hamowania. Aby utrzymać stały przepływ płynu ze zmianami głowy ciśnienia i charakteru pompowanego płynu, czytnik jest używany z kontrolą prędkości pętli zamkniętej.
Schemat sterowania prędkości pętli zamykającej z kontrolą prądu wewnętrznego pokazano na rysunku 6.56. Działa w taki sam sposób, jak schemat z rysunku 3.5.
Dysk ten jest szeroko stosowany w szkoleniu o średnim i wysokim wentylatorze i pompie (do około 10 MW), ze względu na wysoką wydajność i niski koszt.
Dysk zapewnia stałą kontrolę momentu obrotowego (eqn. (6.98)). Statyczne odtwarzacz Kramer otrzymuje stałą kontrolę mocy opisaną poniżej.
Napęd Kramer Static:
Moc przesuwna wirnika jest przekształcana w CC przez most diodowy (ryc. 6.57 (a)). Moc CC jest teraz przekształcana w silnik CC połączony mechanicznie z silnikiem indukcyjnym. Para dostarczana na koszt jest sumą momentu obrotowego wytwarzanego przez silniki indukcyjne i prądowe. Kontrola prędkości jest uzyskiwana przez kontrolowanie pola silnika prądu ciągłego.

Rysunek 6.57 (b) pokazuje zmiany VD1 i VD2 z prędkością dla dwóch wartości prądu prądu silnika stałego. Operacja stała jest uzyskiwana, gdy VD1 = VD2, tj. À A i B dla pól pola IF1 i IF2.
Kontrola prędkości jest możliwa do synchronicznej prędkości około połowy prędkości synchronicznej. Gdy wymagany jest większy zakres prędkości, most diody zostaje zastąpiony mostem Thyristor.
Teraz związek między VD1 a prędkością można zmienić, kontrolując gniew prostownika prostownika tyrystora (patrz ryc. 6.57 (c)). Prędkość można teraz sprawdzić, aż do zatrzymania.