Modulacja amplitudy silnika: silnik indukcyjny:
Metoda modyfikacji słupka, jak już omówiono, pozwala na zmianę prędkości o współczynnik 2. W niektórych zastosowaniach zmiana prędkości jest wymagana tylko przez niewielką ilość, na przykład niektóre wentylatory i czytniki pomp wymagają zmniejszenia prędkości w celu zmniejszenia mocy do maksymalnej do połowy uwagi.
Ponieważ moment obrotowy jest proporcjonalny do kwadratu w kwadratu w czytniku wentylatora, moc jest proporcjonalna do (prędkości) 3. Połowa mocy nominalnej jest uzyskiwana, gdy prędkość jest zmniejszona o około 20%. Taka niewielka zmiana prędkości jest możliwa dzięki silnikowi indukcyjnym amplitudy biegunów.
Rozkład MMF w pieszych wędrówkach z powodu uzwojenia stojana trzypoziemicznego silnika indukcyjnego można ogólnie zapisać jako
gdzie θ jest kątem mechanicznym.
W zwykłym silniku indukcyjnym amplitudy MMFS FMA, FMB i FMC są stałe i równe. W omawianej metodzie amplitudy są zróżnicowane (lub modulowane) w zależności od reguły:
Teoretycznie K i α mogą mieć wartości.
Zastąpienie równania. (6.65) w (6.64)
które można napisać jako
![]()

Zatem silnik indukcji modulacji amplitudy biegunów MMF w trójfazowej maszynie z słupkami P, wytwarza dwa zestawy trzech fazowych MMF z słupkami (P -K) i (P + K). Ponieważ dwa zestawy słupków wytwarzają pary w przeciwnych kierunkach, jeden z nich musi zostać usunięty.
Można to zrobić, wybierając wartość α 2π / 3 lub –2π / 3. Równanie. (6.67) Oczywiste jest, że liczba zmodyfikowanych biegunów będzie (p + k) w starożytnych i (p – k) w tych ostatnich, ponieważ inne bieguny wytwarzają CO -platform MMF, które nie wytwarzają średniego momentu obrotowego.
Zwykle wartość k, znana jako cykl modulacji, stała się jednostką. Nawet wtedy bardzo trudno jest wdrożyć prawo modulacji równań. (6.66) ze względu na swoją sinusoidalną naturę. Można go jednak uprościć jako
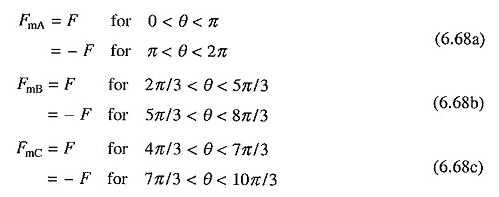
Faza modulacji fazy A jest reprezentowana na rysunku 6.29 (a). Sinusoidalne prawo modulacji zostało zatem przybliżone przez prostokątną alternatywną falę prądu. Oznacza to, że dla zmiany liczby biegunów prąd w ostatniej połowie cewek w każdej fazie jest odwrócony.
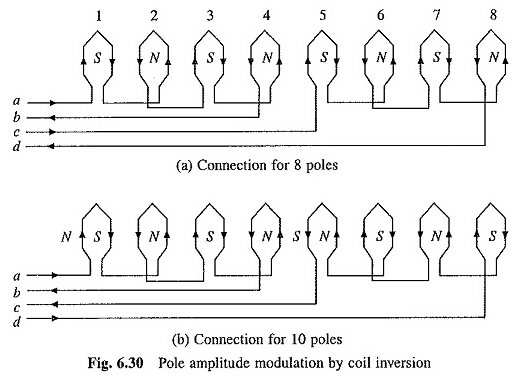
To prawo jest znane jako odwrócenie cewki. Rysunek 6.30 pokazuje wdrożenie tego prawa dla stojana 8 -polowego. Z bieżącym kierunkiem zilustrowanym na rysunku 6.30 (a) maszyna działa z 8 biegunami. Odwrócenie grupy cewki CD modyfikuje liczbę biegunów do 10, jak pokazano na rysunku 6.30 (b).
Również tutaj wymagany kierunek prądów przez cewki można uzyskać, łącząc grupy cewek AB i CD w szeregu lub równolegle.
Dzięki dobrym wyborze połączeń serii i równoległych z jednej strony i delta i gwiazdy z drugiej strony można uzyskać stałe operacje momentu obrotowego, stałą moc i zmienny moment obrotowy.
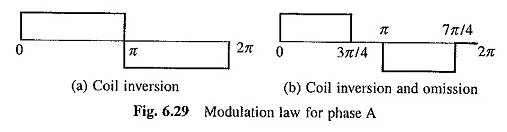
Inne proste prawo silnika indukcyjnego modulacji amplitudy biegunów, znanego jako odwrócenie i pominięcie cewki, pokazano na rycinie 6.29 (b) dla fazy A. będzie wymagało jednak, aby połączenia zostały opublikowane dla trzech grup cewek dla każdej fazy. Rysując figurę podobną do FIG.
6.30, można wykazać, że silnik indukcyjny modulacji amplitudy biegunów 8 -polowej maszyny daje 6 słupów.
Podobnie jak systemy post, które nie są naprzemiennie wzdłuż peryferii, te zmodyfikowane silniki połączeniowe cierpią z powodu prądów harmonicznych i napięć oraz mają współczynnik mocy i wydajność niższą niż w przypadku ewolucji biegunów opisanych w poprzednim rozdziale. Znajdują aplikacje w fanach, fanach i szkoleniu pomp.