Silnik indukcyjny pojedynczej fazy:
Silnik indukcyjny pojedynczej fazy obejmuje jednopoziomowe uzwojenie rozproszone na stojanie i normalny wirnik wiewiórki, jak schematycznie zilustrowano na rysunku 10.1, w którym dla wygody uzwojenie stojana jest zilustrowane w skoncentrowanej formie.

Istnieją dwie ważne metody analizy tego silnika, a mianowicie
- Teoria pola poprzecznego i
- Teoria obrotowych pól.
Ponieważ ta ostatnia przypomina bardziej teorię trzech fazy indukcyjnej zaawansowanej wcześniej, zostanie ona przyjęta tutaj.
Pole pulsujące jak dwa obracające się pola:
Rysunek 10.1 podaje schemat silnika indukcyjnego jednofazowego z uzwojeniem stojana i wirnikiem klatki wiewiórek. Uzwojenie jest dystrybuowane w przestrzeni, tak że podstawowa przestrzeń MMF jest najbardziej dominującym składnikiem prawdziwego rozkładu MMF.
Harmoniczne przestrzenne MMF, jak w przypadku silnika indukcyjnego w trzech fazach, zostaną następnie zignorowane. Kiedy uzwojenie przenosi prąd sinusoidalny, wytwarza MMF rozmieszczony w przestrzeni sinusoidalnie, której pulsująca wartość szczytowa w czasie. Jak pokazuje oś uzwojenia, MMF pod dowolnym kątem θ
![]()
gdzie θ jest kątem mierzonym od osi uzwojenia. TERAZ
![]()
tak, że MMF ma zarówno rozkład przestrzeni, jak i czas wyrażony
![]()
Równanie to można manipulować trygonometrycznie w postaci

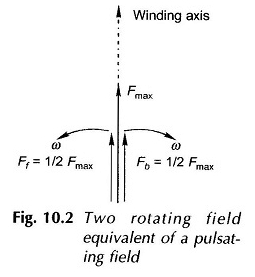
Równanie (10.4) mówi nam, że pulsowane pole pojedynczej fazy można uznać za superpozycję dwóch pól obrotowych działających z prędkością synchroniczną (ω = 2πf wybrany. Rad / s) w przeciwnych kierunkach:

Te dwa pola mają amplitudę równą (1/2) Fmax, gdzie Fmax jest maksymalną wartością pulsującą MMF wzdłuż osi uzwojenia. Rozdzielenie pojedynczego pulsacyjnego pola na dwóch polach obrotowych działających w przeciwnych kierunkach pokazano na rycinie 10.2.
Ta rysunek pokazuje lokalizację pól obrotowych w czasie, gdy MMF wzdłuż osi uzwojenia wynosi + Fmax.
Ślizganie wirnika w porównaniu do dwóch obrotowych pól:

W przypadku unikalnego przypadku zilustrowanego na rysunku 10.1, Rysunek 10.3 pokazuje pola obrotowe do przodu i z tyłu z wirnikiem, który działa z prędkością N w kierunku pola przedniego. Następnie przesunięcie wirnika w odniesieniu do pola obrotowego do przodu FF

Podczas gdy wirnik przesuwa się w odniesieniu do pola zwrotnego FB

Zatem szkiełka wirnika w porównaniu z dwoma pola obrotowym są różne i są podawane przez równania (10,5a) i (10,5b).
Charakterystyczne dla prędkości silnika silnika indukcyjnego pojedynczego fazy:
Jakościowe leczenie w stanie stacjonarnym wirnika (n = 0, to znaczy s = 1), dwa pola obrotowe przesuwają się przed wirnikiem z tym samym przesunięciem, s = 1, (patrz równania (10,5A) i (10,5b)) indukują równe prądy w wirniku wiewiórki.
Dwa pola obrotowe mają ten sam opór i wytwarzają równe i przeciwne pary, co prowadzi do momentu początkowego netto o wartości zerowej. Dlatego pojedynczy pojedynczy silnik indukcyjny jednofazowy jest zatem początkiem non-Proper.
Ponadto dwa pola obrotowe indukują EMF, które powstają stojan, który równoważy zastosowane napięcie, zakładając niską impedancję wycieku uzwojenia stojana.
Jeśli jednak wirnik jest zaprojektowany do działania z prędkością N w kierunku pola przedniego, dwie zmiany są teraz S i (2 – s).
Dla normalnej operacji (2 – s) ≫ S, a zatem prądy wirnika indukowane przez tło, są znacznie wyższe niż po zatrzymaniu i mają niższy współczynnik mocy.
Odpowiednie przeciwne MMF wirnika, w obecności impedancji stojana, prowadzi do znacznie zmniejszenia z pola do tyłu. Z drugiej strony pole obrotowe w kierunku niskiego przesunięcia indukuje mniejsze prądy wyższego współczynnika mocy w wirniku niż po zatrzymaniu.
Prowadzi to do doskonałej poprawy fali przepływu przedniego.
Ta redukcja z pola do tyłu i wzmocnienie pola przedniego zależy od przesunięcia, a różnica wzrasta wraz ze zmniejszeniem śluzowania S (w porównaniu z polem przednie) lub prędkości wirnika w kierunku przednim zbliżonym do prędkości synchronicznej.
W rzeczywistości, blisko prędkości synchronicznej, przednie pole może być polem kilka razy. W rezultacie jest para netto. Dwa pola muszą zawsze indukować uzwojenie EMF stojana, aby zrównoważyć zastosowane napięcie.
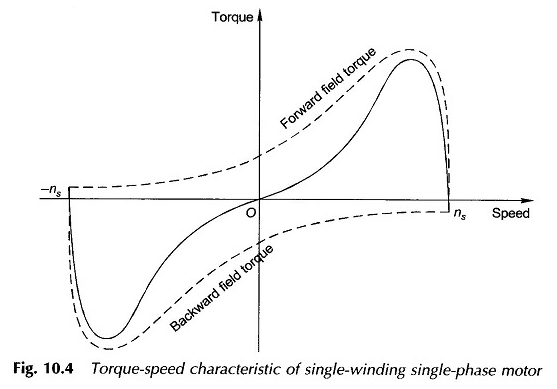
Całkowita charakterystyka prędkości momentu obrotowego jako suma dwóch charakterystyk prędkości momentu obrotowego (przednia i tylna) jest rysowana na rycinie 10.4.
Wynik osłabienia pola i jednoczesnego wzmocnienia drugiego prowadzi do charakterystycznej prędkości momentu obrotowego, takiego jak silnik indukcyjny z trzema fazą w obszarze prędkości zbliżonej do synchronicznej. Fakt z zerowym momentem startowym -Up jest tutaj natychmiast obserwowany.
Pole przednie i pole reakcji w kierunku z tyłu wirnika, a także tło z tyłu i przednie pole reakcji wirnika poruszają się w przeciwnych kierunkach o względnych prędkościach 2N, wytwarzając drugi harmoniczny pulsowany moment obrotowy o średniej wartości zerowej.
W związku z tym silnik indukcyjny pojedynczego fazy to najgłośniejszy silnik niż silnik 3 -fazowy, który nie ma takiego pulsującego momentu obrotowego. Pulsujący moment obrotowy jest w rzeczywistości bezpośrednią konsekwencją mocy pulsującej w jednym obwodzie fazowym.
W rzeczywistości, w charakterystyce prędkości momentu obrotowego pojedynczego silnika indukcyjnego fazowego, kolejność momentu obrotowego reprezentuje średni moment obrotowy.
Analiza półilościowa:
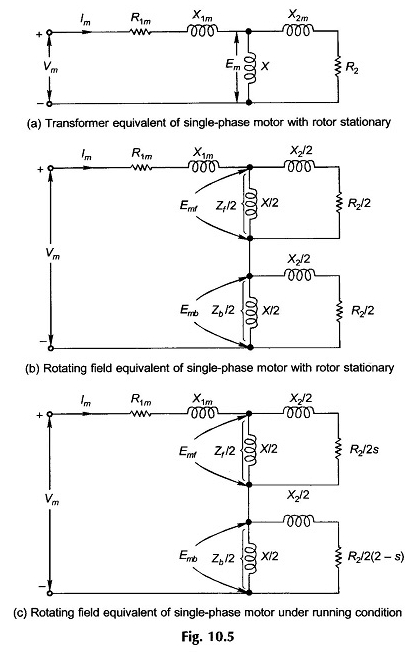
Aby opracować model obwodu pojedynczego silnika z pojedynczym wakuum w ramach częściowo-ilościowej, zostaną użyte argumenty heurystyczne. Silnik z stacjonarnym wirnikiem działa po prostu jako transformator z modelem obwodu, jak pokazano na rys.
10.5 (a), gałąź Core-Dédoute została zignorowana. Sufiks M w stojanie odnosi się do głównego uzwojenia, a EM to EMF indukuje stojan skonfigurowany przez pole alternatywne.
Silnik jest teraz widoczny z punktu widzenia teorii pola obrotowego. Powstały indukowany EMF składa się z dwóch równych składników indukowanych przez dwa przeciwne pola obrotowe tego samego oporu, to znaczy
![]()
Magnetyzacja i impedancje wirnika są podzielone na dwie równe połowy połączone szeregowo, jak pokazano na rysunku 10.5 (b); Silnik zachowuje się jak dwa silniki połączone w szeregu A odpowiadające każdemu pola obrotowego.
Obwody dwóch elementów silników są identyczne ze stanem stacjonarnym, ponieważ wirnik ma takie samo przesunięcie w porównaniu z każdym polem obrotowym.
Gdy wirnik działa z prędkością N w porównaniu do pola przedniego, przesunięcie jest S w porównaniu z nim i (2 – s) w porównaniu z polem obrotowym z tyłu, aby model obwodu modyfikuje się teraz jak na rysunku 10.5 (c).
Z tej figury z łatwością widzimy, że ZF / 2 ≫ Zb / 2, a zatem EMF ≫ EMB, to znaczy, że działanie silnika przedniego pola dominuje, tworząc parę w toku.
Praktyczna potrzeba decyduje, że dwa pola obrotowe mają na celu nierówną siłę w stacjonarnych warunkach, które samodzielnie działają.
Wymaga to jeszcze jednego uzwojenia silnika zwanego uzwojeniem pomocniczym, które jest w kwadraturze przestrzennej z uzwojeniem głównym i obejmuje mniejszą liczbę cieńszych zakrętów.
Uzwojenie to można odciąć od obwodu po uruchomieniu silnika, z wyjątkiem przypadku silnika zarządzanego przez kondensator, w którym można go powiązać z usługą ulepszania ogólnego współczynnika zasilania.
Analiza wydajności:
Wydajność silnika indukcyjnego pojedynczego fazy można uzyskać poprzez analizę modelu obwodu silnika podanego na rysunku 10.5 (c), tak jak przeprowadzono dla silnika indukcyjnego w trzech fazach.
Wyniki są podobne do wyników silnika indukcyjnego w trzech fazach, ponieważ model obwodu jest zasadniczo taki sam.
Uprawnienia powietrza dla przednich i tylnych pól są podane przez

gdzie IM jest głównym prądem uzwojenia, a RF i RB są rzeczywistymi częściami impedancji liczby złożonej odpowiednio Z̅F i Z̅B na rycinie 10.5 (c).
Pary wytwarzane przez oba pola można wyrazić jako

gdzie ωs = prędkość synchroniczna w rad / s.
Ponieważ dwa pola biegną w przeciwnych kierunkach, para wyprodukowana przez oba przeciwna. Powstała para opracowana jest zatem

Straty miedzi wirnika są na ogół równe czasom przesuwanym mocy powietrza. Więc

Moc elektryczna przekształcona w rażący kształt mechaniczny jest

Równanie (10.11) można również zapisać jako

Oznacza to, że wejście zasilania elektrycznego do silnika zaniedbującego utratę miedzi stojana jest
![]()