Indukcyjna zmiana silnika:
Zmiana bieguna silnika indukcyjnego – dla danej częstotliwości prędkość synchroniczna jest odwrotnie proporcjonalna do liczby biegunów. Prędkość synchroniczna, a zatem prędkość silnika można modyfikować, modyfikując liczbę biegunów.
Przepisy dotyczące modyfikowania liczby biegunów muszą być włączone do etapu produkcyjnego, a maszyny te nazywane są „silnikami zmiany słupów” lub „kilkoma silnikami prędkości”.
Rotor wiewiórki nie jest zwinięty dla określonej liczby biegunów. Wytwarza taką samą liczbę biegunów, jak uzwojenie stojana. Dlatego w silniku klatki wiewiórki wymagany jest tylko modyfikacja liczby słupów w stojanie.
W silniku ran wymagany jest również układ modyfikacji liczby biegunów w wirniku, który komplikuje maszynę. Dlatego ta zmiana bieguna metody sterowania silnikiem indukcyjnym jest stosowana wyłącznie z silnikami klatkowymi wiewiórkami.
Prostym, ale kosztownym układem modyfikowanym liczbą słupków stojana jest użycie dwóch oddzielnych uzwojeń stojana, które są zwinięte dla dwóch różnych biegunów. Ekonomiczną i powszechną alternatywą jest użycie pojedynczego uzwojenia stojana podzielonego na kilka coelów cewek.
Liczba biegunów jest modyfikowana poprzez modyfikację połączeń tych grup cewek. Teoretycznie poprzez podzielenie uzwojenia na wiele grup cewek i pozostawiając terminale wszystkich tych grup, pewną liczbę biegunów można uzyskać poprzez ponowne połączenie tych grup.
W praktyce, dla uproszczenia, uzwojenie jest podzielone tylko na dwie grupy cewek. Umożliwia to zmianę liczby bieguna o współczynnik 2 .. Umieszczenie uzwojenia dla tego konkretnego przypadku wyjaśniono w następujący sposób:
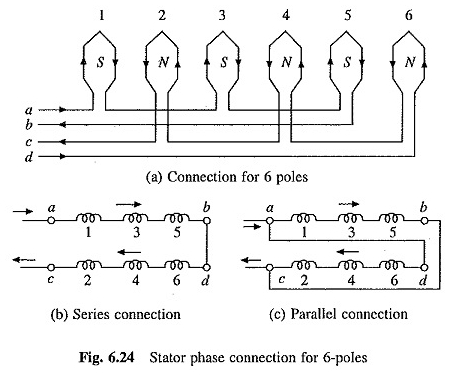
Rysunek 6.24 (a) pokazuje uzwojenie fazowe złożone z 6 cewek podzielonych na dwie grupy AB złożone z ponumerowanych nietypowych cewek (1, 3, 5) połączonych standardowymi i CD jednolitych cewek (2, 4, 6) połączonych szeregowo.
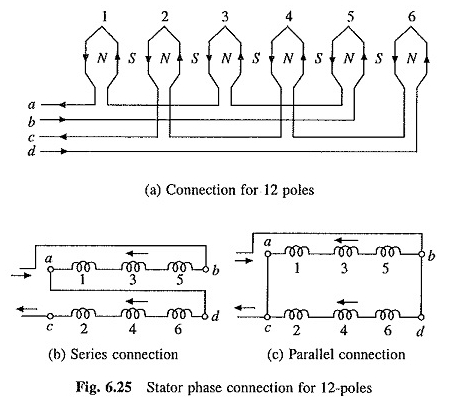
Cewki można zaprojektować do transportu prądu w danych podanych przez łączenie Coels cewek szeregowych lub równolegle, zilustrowane odpowiednio na ryc. 6.24 (b) i (c). Z tym połączeniem, maszyna 6 -pole. Jeśli prąd przez cewki grupy AB jest odwrócony (ryc. 6.25 (a)), wszystkie cewki wytwarzają bieguny północne. F
Luksusy wychodzące z tych północnych słupów znajdą teraz drogę przez przestrzenie międzyplatformowe do wyjścia, a tym samym wytwarzając południowe słupy w odtwarzaniach. W ten sposób maszyna będzie miała teraz 12 utworów.
Ponownie, wymagany kierunek prądu przez cewki można uzyskać, podłączając dwie sekcje AB i CD szeregowo lub równolegle, jak wskazano na rysunku 6.25 (b) i (c).
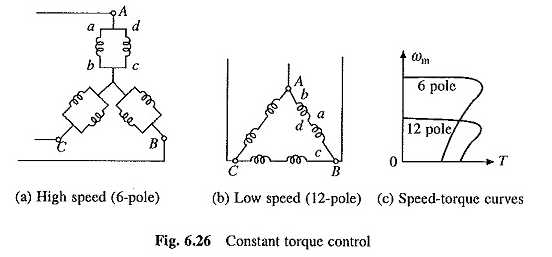
Zatem każda faza uzwojenia maszyny ma dwie grupy cewek, AB i CD, które można połączyć szeregowo lub równolegle dla dwóch biegunów 6 i 12.
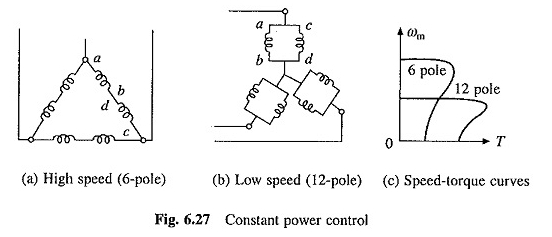
Ponadto można podłączyć trzy fazy maszynowe w celu utworzenia połączenia delta lub gwiazdy.
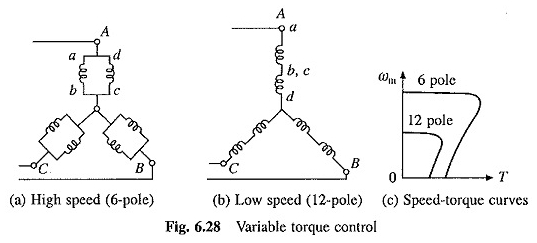
Wybierając odpowiednią kombinację połączeń szeregowych lub równoległych między grupami cewki każdej fazy a połączeniem Star lub Delta między fazami, zmianę prędkości można uzyskać przy stałym operacji momentu obrotowego, operacji mocnej zasilania lub zmiennej operacji momentu obrotowego. Połączenia i krzywe kluczowej prędkości dla tych operacji są reprezentowane na ryc. 6.26 do 6.28.