Triphase Indukcja Kontrola prędkości silnika:
W szczególności problem kontrolowania prędkości silnika indukcyjnego z trzema fazą ma ogromne znaczenie.
W wielu branżach silniki muszą spełniać bardzo surowe charakterystyczne wymagania, zarówno w odniesieniu do zakresu, jak i słodyczy kontroli, a także w odniesieniu do funkcjonowania ekonomicznego.
Z punktu widzenia z widoku prędkości charakterystyki silnika indukcyjnego trzyfazowego silniki indukcyjne są niższe niż silniki DC.
Prędkość silnika CC bocznego można regulować między szerokim zakresem o dobrej wydajności i dobrej regulacji prędkości, ale w silnikach indukcyjnych prędkości nie można zmieniać bez utraty wydajności i dobrej regulacji prędkości.
Szybkość silnika indukcyjnego wyraża wyrażenie

Zatem istnieją trzy czynniki, a mianowicie częstotliwość mocy F, liczba Ple Pôles P i wymuszenie S, od których zależy prędkość silnika indukcyjnego. Dlatego, aby zmienić prędkość silnika indukcyjnego, konieczne jest zmodyfikowanie co najmniej jednego z trzech powyższych czynników.
Trzy -fazowe metody kontroli prędkości silnika są rozróżniane w zależności od głównego działania silnika: (i) po stronie stojana i (ii) po boku wirnika.
Różnymi metodami kontrolowania prędkości silnika indukcyjnego trójfazowego po stronie stojana to (a) zmienność częstotliwości zasilania (b) Zmienność zastosowanego napięcia i (c) poprzez modyfikację liczby biegunów.
Z boku wirnika prędkość można kontrolować (a) poprzez modyfikację rezystancji w obwodzie wirnika i (b) poprzez wprowadzenie do obwodu wirnika dodatkowy emf tej samej częstotliwości, co podstawowy emf wirnika.
W przypadku tej najnowszej trójstronnej metody sterowania silnikiem indukcyjnym konieczne jest dodatkowe urządzenie elektryczne lub więcej z tych maszyn.
Zestaw złożony z regulowanego silnika indukcyjnego i jednego lub więcej dodatkowych maszyn elektrycznych, które są do niego podłączone elektrycznie lub mechanicznie, nazywa się kaskadą. Maszyny przełączników są powszechnie używane jako dodatkowe maszyny.
1. Kontrola prędkości według zmiany częstotliwości zasilania
Ta trzypasowa metoda kontroli silnika indukcyjnego zapewnia szeroki zakres kontroli prędkości z postępującą zmiennością prędkości na tej plaży. Główną trudnością z tą metodą jest uzyskanie diety na zmiennej częstotliwości.
Sprzęt pomocniczy wymagany w tym celu prowadzi do wysokiego pierwszego kosztu, zwiększonej konserwacji i spadku ogólnej wydajności. Dlatego ta metoda nie jest używana do zastosowań kontroli prędkości do ogólnego użycia.
Pomimo faktu, że ten schemat jest skomplikowany, istnieją pewne zastosowania, w których jego szeroki zakres prędkości i dobra regulacja prędkości stale sprawiają, że są bardzo pożądane.
Jeśli silnik indukcyjny musi działać przy różnych częstotliwościach z praktycznie stałymi wartościami wydajności, współczynnika mocy, pojemności przeciążenia i stałym przesunięciem bezwzględnym, wówczas z nienasyconym żelazem konieczne jest, aby napięcie zasilania było zmienne proporcjonalnie do częstotliwości zasilania.
Na przykład ten rodzaj zmienności może wystąpić, jeśli generator energii podlega zmianom prędkości, albo z powodu chwilowych przeciążeń lub z powodu znacznej regulacji prędkości. Napięcie i częstotliwość wyjściowa różnią się zarówno jako prędkość, jeśli nie jest dostarczana automatyczna korekta.
Podczas niektórych dużych treningów morskich silniki śmigła są typem indukcji i są kontrolowane z prędkością z takiego lokalnego zasilania, który jest dostarczany przez generatory synchroniczne w połączeniu z turbinami ze zmienną prędkością.
Nawet w takich przypadkach zakres zmian prędkości jest ograniczony, ponieważ skuteczność głównych silników szybko spada wraz ze zmianą prędkości w porównaniu z tym, co zostały zaprojektowane.
Typowe krzywe prędkości prędkości dla czterech różnych częstotliwości przedstawiono na rysunku 1.25.

2. Kontrola prędkości według zmiany napięcia zasilania
Jest to metoda sterowania poślizgiem o zmiennym napięciu zasilania stałej częstotliwości. W tej metodzie kontrolowania prędkości silników indukcyjnych napięcie przyłożone do stojana jest zróżnicowane w celu zmiany prędkości.
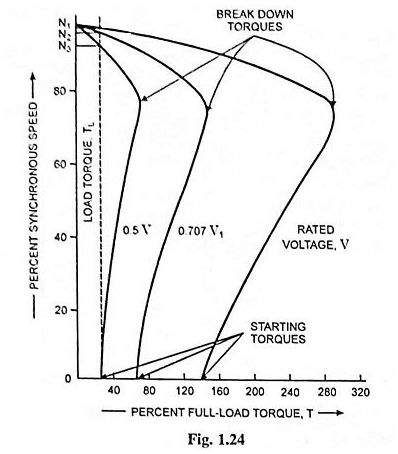
Ta metoda kontroli prędkości silnika indukcyjnego trójfazowego jest prosta, niski w pierwszym koszcie i ma długi koszt konserwacji, że ma ograniczone zastosowanie, ponieważ operacja przy napięciach przekraczających znamionową napięcie jest ograniczona przez nasycenie magnetyczne, (ii) duża zmiana napięcia (iii) rozwinięty moment obrotowy znacznie zmniejsza się wraz z zmniejszeniem napięcia zasilania i silnika i silnika staje się stawiana na obciążenie moment obciążenia. Zakres kontroli prędkości jest bardzo ograniczony w dół, to znaczy prędkość nominalna przy niższych prędkościach.
Ogólnie rzecz biorąc, ta trójfazowa metoda sterowania silnikiem indukcyjnym jest stosowana tylko na obciążeniach, w których wymagany moment obrotowy spadnie znacznie w miarę zmniejszania prędkości, jak w przypadku małych silników klatkowych wiewiórki prowadzących wentylatory.
Zmienne napięcie można uzyskać za pomocą nasyconych reaktorów, warstw lub transformatorów ze zmianą zmiany.
Charakterystyka przyspieszania przy zmniejszonych napięciach pokazano na rysunku 1.24.
3. Kontrola prędkości poprzez modyfikowanie liczby biegunów
Ta metoda ma łatwo zastosować do silników klatkowych wiewiórki, ponieważ uzwojenie klatki automatycznie reaguje, aby utworzyć tę samą liczbę biegunów co stojan.
Ta trójfazowa metoda kontroli silnika indukcyjnego na ogół nie jest możliwa z silnikami korzeniowymi ran, jak w tych maszynach, metoda ta wymagałaby znacznych powikłań projektowania i przełączania, ponieważ połączenia pierwotne i wtórne powinny być modyfikowane jednocześnie, aby wytworzyć tę samą liczbę biegunów w dwóch uzwojeniach. W przeciwnym razie ujemna para zostanie opracowana przez niektóre pasy kierowcy wirnika.
Liczbę par biegunów w stojanie można zmodyfikować w następujący sposób:
(a) Za pomocą kilku uzwojeń stojana: w tej trójstronnej metodzie kontroli silnika indukcyjnego, dwa lub więcej niezależnych uzwojeń, każde uszkodzenie dla innej liczby biegunów są umieszczane w tych samych automatach. Liczba postów uzwojenia stojana jest w tym
W żadnym przypadku współzależnie powiązane i nie można go wybrać arbitralnie zgodnie z warunkami pracy tego silnika.
Na przykład silnik dwuosobowy może mieć dwa uzwojenia stojanowe, uraz dla 4 słupów i drugi dla 6 biegunów, które zapewnią synchroniczne prędkości 1500 obr / min i 1000 obr./min z częstotliwością mocy 50 Hz.
Czasami używane są również silniki z czterema niezależnymi uzwojeniami stojanowymi i dają cztery synchroniczne prędkości (a zatem działają). Oczywiście uzwojenie jest używane jednocześnie, a pozostałe są całkowicie nieskuteczne.
Zmiana z jednej prędkości na drugą może być przeprowadzona przez przełącznik mechaniczny lub styczniki. Z takim układem, uzwojenia lub uzwojenia, które nie są / nie są używane, muszą być utrzymywane przez przełącznik lub przynajmniej pozostawione w gwiazdzie.
W przeciwnym razie, ze względu na działanie transformatora, uzwojenie, które jest związane z pokarmem, wywołałoby napięcia w nieaktywnym uzwojeniu i spowodowało przegrzanie z powodu następujących prądów krążących.
Sama regulacja jest równoważna modyfikacji prędkości silnika w krokach, ponieważ jedno lub drugie uzwojenie stojana jest podłączone do sektora energii.
Z każdą zmianą silnik jest w warunkach zasadniczo podobnych do warunków odlotu, to znaczy znaczący prąd i zmniejszony moment obrotowy. Z powodu nieaktywnych sterowników ta metoda zmiany słupka wymaga dużego stojana, że silnik z jedną prędkością tej samej nuty.
Ta metoda zastosowano do silników windowych, silników trakcyjnych, a także do małych silników do napędzania maszyn.
(b) Metoda istotnej bieguny: Metoda zmiany bieguna do kontroli prędkości trójfazowego silnika indukcyjnego opisanego powyżej w (a) tj., metodzie uzwojenia wielokrotnego stojana, jest stosowana tylko w małych silnikach.
W dużych silnikach bardziej odpowiednie jest zastosowanie znacznej techniki bieguna, która eliminuje potrzebę posiadania kilku uzwojeń stojana w celu zmodyfikowania liczby centrów stojana.
Ta trzypoziomowa metoda sterowania silnikiem indukcyjnym wykorzystuje całe uzwojenie dla każdej prędkości. Zwykle w przypadku silnika pojedynczego prędkości kolejne grupy cewek są zwinięte, aby stworzyć sukcesywnie przeciwne centra polaryzacji. Zilustrowano to na rycinie 1.83, w której opracowano fazę uzwojenia czteroosobowego.
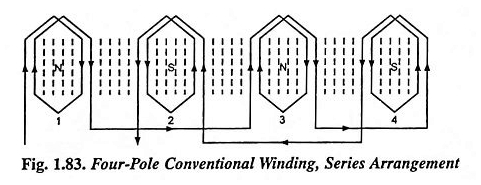
Należy zauważyć, że wszystkie cewki są szeregowe, ale ostateczne połączenia są ustanawiane z grupami alternatywnymi, to znaczy grupa 1 w grupie 3 i grupie 4 w grupie 2.
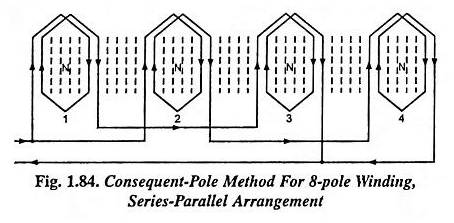
Teraz końcowe połączenia grup o tych samych cewkach można zmodyfikować, aby mieć kolejne cewki o tej samej polaryzacji, jak pokazano na rycinie 1.84.
Równolegle do szeregowych połączeń grup 2-4 z tymi grupami 1-3, biegunowość grup 2 i 4 zmieniła się, tak że są teraz cztery kolejne bieguny północne.
W wyniku tych południowych biegunów powstaje między każdym z północnych biegunów, a silnik ma teraz 8 -polę.
Zatem w przypadku zasilania 50 Hz rozmieszczenie serii daje synchroniczną prędkość 1500 obr./min, podczas gdy układ serii Parral zapewnia synchroniczną prędkość 750 obr./min.
Możliwe jest również użycie szeregowego układu równoległego do uzwojenia 4 -pole, a następnie poruszanie się w serii dla uzwojenia 8 -pole. Obwód zmiany trójstronnej uzwojenia uzwojenia 2 do 4 postu ilustruje na rycinie 1.85.
Ponownie łącząc wszystkie grupy cewek dla tej samej polaryzacji, stojan działa tak, jakby miał dwa razy więcej biegunów niż grupy biegunów. W ten sposób utworzone dodatkowe bieguny nazywane są znacznymi biegunami, a uzwojenie jest znane jako kolejne uzwojenie.
Dzięki pojedynczej układu przełączania możliwe jest standardowe (lub konwencjonalne) połączenie po jednej stronie podwójnego przełącznika uruchamiania i połączenie znacznego słupka po drugiej stronie przełącznika.
W ten sposób można uzyskać dwie prędkości, większą prędkość z konwencjonalnym połączeniem i pół drukowania ze znacznym połączeniem przez słup.

W silnikach wykorzystujących znaczną technikę bieguna do kontroli prędkości najlepszy możliwy projekt nie jest generalnie uzyskiwany przy obu prędkościach.
Innymi słowy, pożądane cechy, takie jak współczynnik wysokiej mocy, są poświęcane z prędkością, tak że uzyskiwany jest dość dobry współczynnik mocy przy drugiej prędkości.
Czasami połączenia stojana przeszły z delty do gwiazdy w tym samym czasie, gdy połączenia post są modyfikowane. Zmienia to napięcie i umożliwia lepszy silnik przy każdej prędkości.
Silniki z dwóch prędkości są zwykle wytwarzane z uzwojeniem na stojanie, liczba biegunów modyfikowanych w stosunku 1: 2. Silniki trzech i czterech prędkości są wyposażone w dwa uzwojenia statystyki, jeden lub oba są wytwarzane przez modyfikowanie liczby biegunów.
Na przykład, w razie potrzeby uzyskanie silnika dla czterech prędkości synchronicznych; 1500, 1000, 750 i 500 obr./min, na stojanie należy umieścić dwa uzwojenia, z których jedno podają 4 i 8 słupków, a drugi dający 6 i 12 biegunów.
Korzystając z równoległego połączenia w szeregu poszczególnych grup fazowych, fazy same można połączyć w Star / Delta, co prowadzi do operacji dwupiętej z trzema rodzajami charakterystyk prędkości momentu obrotowego, mianowicie stałego momentu obrotowego, stałej mocy i zmiennego momentu obrotowego.
Z powodu komplikacji w projektowaniu i przełączaniu uzwojenia stojana nie można uzyskać więcej niż czterech prędkości dla dowolnego silnika dzięki tej metodzie kontroli prędkości. Ta metoda nie zapewnia również progresywnej kontroli prędkości.
Dlatego ta metoda nie jest używana do zastosowań kontroli prędkości do ogólnego użycia.
Jednak ta metoda jest bardzo zadowalająca w przypadku aplikacji, takich jak wentylatory wentylacyjne, przenośniki, narzędzia maszynowe lub inne aplikacje wymagające tylko dwóch lub czterech w przybliżeniu stałej operacji.
Ta metoda ma tę zaletę, że prostota, dobra regulacja prędkości dla każdej regulacji, wysoka wydajność i umiarkowane początkowe koszty i konserwacja.
Liczbę par biegunów na stojanie można również modyfikować przy użyciu techniki modulacji amplitudy biegunów – techniki usuniętej uchwytów portów.
Ta metoda zmiany słupka ma tę zaletę, że stosunek dwóch dostępnych prędkości niekoniecznie powinien wynosić 2: 1, jak w metodzie znacznej bieguny.
4. Kontrola impedancji stojana
Zmniejszone napięcie na zaciskach maszynowych można uzyskać poprzez wstawienie zrównoważonej rezystancji lub indukcyjności szeregowej z każdym drutem stojana. W takich warunkach napięcie zacisku silnika staje się zależne od prądu silnika, a napięcie zmienia się wraz z przyspieszeniem silnika. Charakterystykę momentu obrotowego z typową prędkością pokazano na rycinie 1.86.
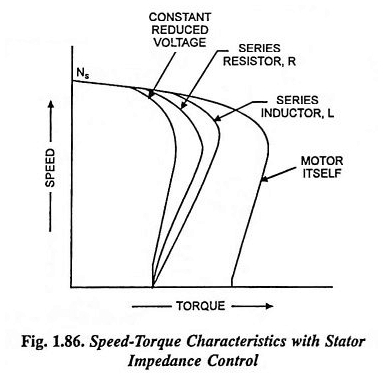
Jeśli impedancja (R lub X) zostanie dostosowana, aby zapewnić ten sam początkowy moment obrotowy, charakterystyka prędkości pisklęcia w przypadku dodania indukcyjności miałaby większy moment obrotowy niż z dodatkową oporem.
Ponadto te dwie cechy pozwalają nam mieć większe pary niż te uzyskane z cechą ze zmniejszonym zastosowanym napięciem dla tego samego momentu początkowego.
Wstawienie oporu do obwodu stojana poprawia współczynnik mocy, ale po cenie większych strat energii.
5. Kontrola prędkości przez zmianę rezystancji wirnika (lub kontrola rezystancji wirnika)
Silniki główne ran są ogólnie wypuszczone przez połączenie oporności początkowej w obwodzie wtórnym, które są zwarte etapami, gdy silnik przyspiesza.
Jeśli wartości omowe tych rezystorów są odpowiednio wybrane i jeśli rezystory te są zaprojektowane do ciągłej pracy, mogą być użyte do podwójnego celu, aby uruchomić i kontrolować prędkość. Również oczywiste, metodę tę można zastosować do silników wirnika zwiniętego samego.
Miękkość kontroli prędkości zależy od liczby etapów dostępnych rezystorów. Kontrola znajduje się w kierunku w dół podstawowej prędkości. Zakres kontroli prędkości nie jest stały i zależy od wartości obciążenia.
Ta metoda kontroli prędkości ma charakterystykę podobną do prędkości silnika SHUNT DC za pomocą oporu szeregowego z ramą. Jego głównymi wadami są niższa wydajność i słaba regulacja prędkości ze względu na wzrost oporu wirnika na ustawienia o niskiej prędkości.
Na przykład przy 50% prędkości synchronicznej skuteczność wirnika wynosi tylko 50%, a wydajność silnika byłaby nieco mniejsza. Zmienność prędkości jest ograniczona do zakresu od 50 do 100%.
Preferowane są płynne reostaty metalowe, ponieważ nie mają one indukcyjności, a rezystory można delikatnie wyciąć, dając jednolity moment obrotowy.
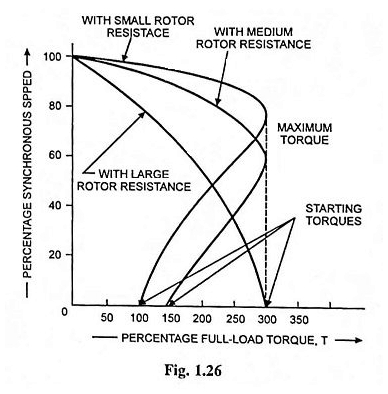
Wprowadzenie zewnętrznych rezystancji w obwodzie wirnika silnika indukcyjnego z pierścieniem przesuwnym zmodyfikuje charakterystykę prędkości, jak pokazano na rysunku 1.26.
Ta trzypoziomowa metoda kontroli silnika indukcyjnego jako taka nie nadaje się zatem do kontrolowania prędkości do stałego momentu obrotowego.
Ale ta metoda jest szeroko stosowana w przypadku obciążeń, w których wymagana para spadnie znacznie wraz ze zmniejszeniem prędkości, na przykład obciążenia wentylatora, dla których wprowadzanie podawania znacznie spada, gdy prędkość jest zmniejszona, co z kolei zmniejsza straty miedzi w wirniku.
Ponadto metoda ta nie jest przyjmowana do ciągłej kontroli prędkości, ale jest preferowana do przerywanego działania (czas krótki). Taka metoda kontroli prędkości jest szeroko stosowana w praktyce, dla silników o niskiej mocy i w dźwigach powietrznych.
Czasami jest to jednak stosowane do regulacji prędkości wałków, w szczególności tam, gdzie są one dostarczane z falbanami w celu zmniejszenia pików ładowania w obwodzie.
Tutaj reostat, zwany kontrolą rejsu, jest automatycznie włączony, gdy obciążenie wzrasta, a zatem prędkość maleje, a część obciążenia jest zrównoważona ze szkodą dla energii kinetycznej kierownicy.
I odwrotnie, gdy obciążenie maleje, odporność na obwód wirnika jest zmniejszony; Prędkość rośnie, a kierownica zaczyna przechowywać energię kinetyczną.
6. Wtórna kontrola napięcia zagranicznego
W tej metodzie prędkość silnika indukcyjnego jest kontrolowana przez wstrzyknięcie napięcia częstotliwości przesuwnej w obwodzie wtórnym.
Jeśli wstrzyknięte napięcie jest zgodne z indukuje EMF w obwodzie wtórnym, jest to równoważne zmniejszeniem rezystancji w obwodzie wtórnym, dlatego przesunięcie zmniejsza się lub wzrasta prędkość.
Możliwe jest osiągnięcie super synchronicznych prędkości poprzez wstrzyknięcie napięcia częstotliwości przesuwnej w fazie z CMF indukowanym w obwodzie wirnika.
Jeśli wstrzyknięte napięcie znajduje się w fazie opozycyjnej z EMF indukuje w obwodzie wtórnym, jest to równoważne zwiększaniu rezystancji w obwodzie wtórnym, co powoduje wzrost ślizgania się lub zmniejszenie prędkości.
Zatem w tej metodzie możliwa jest szeroki zakres kontroli prędkości poprzez włączenie urządzeń do konwersji częstotliwości do obwodu wirnika.
W tej metodzie przezwyciężone są wady niższej wydajności i słabej prędkości, ale wymaga ona jednej i ogólnie bardziej pomocniczej maszyn do wstrzykiwania EMF częstotliwości przesuwnej do obwodu wtórnego, dlatego jest droższy i stosowany z bardzo dużymi silnikami nut, jak w przypadku silników w stalowych młynach.
Opracowano kilka metod kontrolowania prędkości silników indukcyjnych poprzez wstrzyknięcie napięcia częstotliwości ślizgowej w obwodzie wtórnym.
Różne metody różnią się pod względem wymagań dotyczących sprzętu pomocniczego; Od włączenia sprzętu pomocniczego do projektowania samego silnika indukcyjnego do dość skomplikowanego systemu pomocniczych maszyn obrotowych i regulowanych transformatorów.
Podstawowym kryterium, które taki system musi wypełnić: (i) że zmienne napięcie obce ma częstotliwość ślizgową, to znaczy częstotliwość równa SF i (ii), że energia związana z napięciem obce jest możliwa do odzyskania.
Najczęstszymi systemami opartymi na tej zasadzie są system Kramer, system LeBlanc i Scherbius System kontroli prędkości silników indukcyjnych polifazy.
7. Kontrola prędkości przez połączenie
W tej metodzie konieczne są dwa silniki, z których przynajmniej jeden musi mieć wirnik rany. Dwa silniki można połączyć mechanicznie, aby spowodować wspólne obciążenie.
Jeśli uzwojenie stojana jednego z nich, silnika wirnika rannego, jest podłączone do trzech fazowych zasilaczy prądu przemiennego, a jego uzwojenie wirnika jest podłączone do uzwojenia drugiego stojana silnika, prędkość kombinacji zostanie określona na podstawie sumy lub różnicy liczby biegunów w dwóch maszynach.
W praktyce zwykle jest podłączenie wyjścia wirnika pierwszej maszyny do stojana z drugiej maszyny w taki sposób, aby pola obrotowe dwóch były w tym samym kierunku; W tym stanie wynikowa prędkość zostanie określona przez następujące wyrażenie.

Lub
- F to częstotliwość żywności,
- P1 i P2 to liczba słupów odpowiednio na maszynach I i II.
Aby uzyskać prędkość, powyżej normy, moment obrotowy drugiego silnika jest odwracany przez po prostu modyfikację dwóch gwintów drugiego silnika. Nazywa się to różnicowym wodospadem i pod tym warunkiem będzie podane przez wyrażenie.

Dodatkową kontrolę prędkości, jeśli chcesz, można uzyskać, mając również maszynę drugiej maszyny i wkładając rezystancję sterowania w obwodzie wirnika drugiej maszyny.

Jeśli dwa silniki mają taką samą liczbę biegunów i są połączone w kaskadzie skumulowaną [równ. (1.77)], będą działać o połowę prawie połowę. Ponieważ moment obrotowy drzewa jest w dużej mierze zmniejszony w różnicowej kaskadzie, nie jest stosowany w praktyce.
Wyjście mechaniczne dwóch maszyn jest w przybliżeniu w raporcie

lub P1: P2, to znaczy w stosunku liczby bieguna na maszynach.