Trzy silniki indukcyjne fazy:
Trzy silniki indukcyjne fazy są dwa typy: pudełko wiewiórki i wirnik ran.
W klatce wiewiórki wirnik składa się z podłużnych słupków sterownika zwarte przez okrągłe złącza na obu końcach podczas gdy w silniku wirnika rannego wirnik ma również zrównoważone trójfazowe uzwojenie z tym samym słupkiem, co uzwojenie stojana. Jednak w obu, stojan nosi trójstronne uzwojenie rozproszone.
Analiza i wydajność:
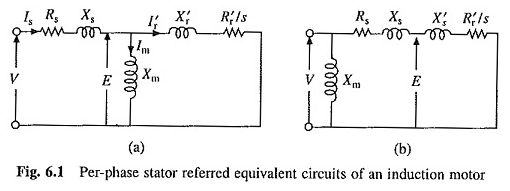
Obwód równoważny fazą silnika indukcyjnego trójfazowego przedstawiono na rycinie 6.1 (a). R’R i X’R są skierowanymi wartościami stojana rezystancji wirnika RR i reaktancją wirnika XR. Przesunięcie jest zdefiniowane przez

gdzie ωm i ωms są odpowiednio prędkościami wirnikowymi i synchronicznymi. Dalej

gdzie F i P są odpowiednio częstotliwością pokarmu i liczbą słupów.
Ponieważ spadek impedancji stojana jest ogólnie znikomy w porównaniu z zaciskiem V napięcie V, równoważny obwód można uprościć do tego pokazanego na rysunku 6.1 (b).
Również równania. (6.1)
![]()
Na rysunku 6.1 (b),

Moc przeniesiona do wirnika (lub zasilania powietrza)
![]()
Utrata miedzi przez wirnika jest
![]()
Moc elektryczna przekształcona w moc mechaniczną

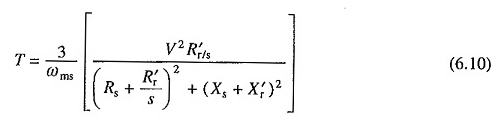
Moment obrotowy opracowany przez silnik
![]()
Zastępowanie równań. (6.3) i (6.7)

Zastępowanie z równania. (6.4) daje
Porównanie równań. (6.5) i (6.9) sugerują, że

Moment wyjściowy silnika na drzewie uzyskuje się przez odejmowanie pary dryfu tarcia i rdzenia rdzenia od rozwiniętego momentu obrotowego.
Rozwinięty moment obrotowy zależy tylko od ślizgania się (równ. (6.10)). Różnicowanie T w (6.10) w odniesieniu do S i asymilacji z zero daje przesunięcie dla maksymalnego momentu obrotowego 
Zastępowanie z równania. (6.12) w (6.10) daje wyrażenie dla maksymalnego momentu obrotowego

Maksymalny moment obrotowy jest również znany jako moment obrotowy. Chociaż jest niezależny od oporu wirnika, SM jest wprost proporcjonalny do oporu na wirnik.
Natury charakterystyki prędkości i prędkości są reprezentowane na rysunku 6.2. Current wirnika i moment obrotowy są zerowe przy prędkości synchronicznej. Wraz ze spadkiem prędkości oba rosną.
Podczas gdy para zmniejszyła się po osiągnięciu wartości rozpadu, prąd wirnika nadal rośnie, osiągając maksymalną wartość przy zerowej prędkości. Spadek prędkości pełnego obciążenia zależy od oporu wirnika.
Gdy opór wirnika jest niski, spadek jest dość mały, a zatem silnik działa głównie ze stałą prędkością. Moment obrotowy jest miarą krótkoterminowej pojemności przeciążenia momentu obrotowego silnika.
Silnik działa w kierunku pola obrotowego. Kierunek pola obrotowego, a zatem prędkość silnika można odwrócić poprzez odwrócenie sekwencji fazowej. Sekwencja fazowa można odwrócić poprzez wymianę dwóch zacisków silnika.
Czasami moment obrotowy jest wyrażany w kategoriach SM i TMAX, który nie tylko ułatwia obliczenia, ale także umożliwia szybkie uznanie charakterystyki prędkości prędkości. Podzielić równanie. (6.10) przez (6.13), a następnie wymień plony (6.12)
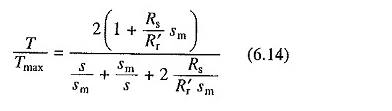
Charakter właściwości prędkości (ryc. 6.2) można teraz łatwo wyjaśnić równaniem. (6.14).
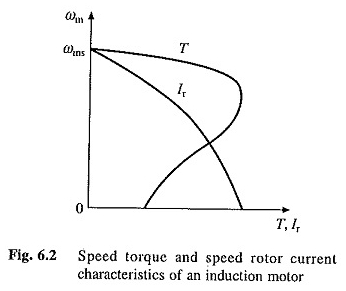
W przypadku zmian znacznie mniejszych niż SM dominuje drugi termin mianownika. Dlatego związek prędkości prędkości 0 do nominalnego momentu obrotowego jest w przybliżeniu reprezentowany przez linię prostą.
W przypadku slajdów znacznie większych niż SM dominuje pierwszy termin mianownika, a związek prędkości ma hiperboliczny w tym regionie.
W całym silniku operacji silnika termin (RSSM / R’R) jest mały w porównaniu z 1 i ostatecznie dominujący w mianowniku. Dlatego można go usunąć z równania. (6.14). Więc

Silniki indukcyjne o specjalnych projektach:
Silnik indukcyjny do ogólnego użytku jest zaprojektowany do działania z niskim slajdem, aby mieć dobrą wydajność. Zgodnie z notatką pełne obciążenie różni się od 2 do 7%.
Taki silnik ma wysoki prąd rozruchowy (5-8 razy) i niski moment początkowego (pełne obciążenie przy pełnym obciążeniu momentu ładowania biletów). Niektóre aplikacje wymagają inaczej zaprojektowania silnika. Niektóre z nich to:
Wysokie silniki indukcyjne:
W przypadku przerywanych aplikacji ładowania, obejmującego rozpoczęcie i zatrzymanie i / lub działanie często przy niskiej prędkości przez przedłużone okresy, silniki indukcyjne są zaprojektowane z wysoką odpornością na wirnik.
Silniki te mają niski prąd rozruchowy i wysoki moment rozruchowy, ale niską wydajność pełnego obciążenia z powodu wysokiej utraty miedzi wirnika. Ponieważ silniki te działają na dużej zmianie (od 10 do 40% przy pełnym obciążeniu), nazywane są silnikami o wysokim przesuwaniu.
Wysokie silniki przesuwne są również odpowiednie do treningu wentylatora, w którym prędkość jest kontrolowana przez kontrolowanie napięcia stojana i znajdują się między dwoma kwadratowymi kasą i wirnikiem rany. Charakter właściwości prędkości strzału tych silników przedstawiono na rycinie 6.3 (c).
W silnikach indukcyjnych przypadków wiewiórki dobra wydajność początkowa (niski prąd początkowy i wysoki moment początkowy) jest wytwarzany bez znaczącego wpływu na wydajność pełnego obciążenia za pomocą głębokiego paska lub silników wirnika wirnika podwójnego klatki.
Częstotliwość wirnika wzrasta z 50 Hz do 1-3 Hz, gdy prędkość wychodzi z zatrzymania przy pełnym obciążeniu: W tych silnikach stosuje się zmianę częstotliwości wirnika, aby zmieniać opór na wirnik o wysokiej wartości przy zatrzymaniu przy bardzo małej wartości przy pełnej prędkości.
Zatem, chociaż ulepszona jest początkowa i niska wydajność, pełne obciążenie nie jest znacznie wykonywane.
Zastępca silnik indukcji indukcji wiewiórki:
Machine Stator jest identyczny z silnikiem indukcyjnym do ogólnego użytku. Rotor ma głębokie i wąskie słupki kierowcy, jak pokazano na rysunku 6.3 (a).
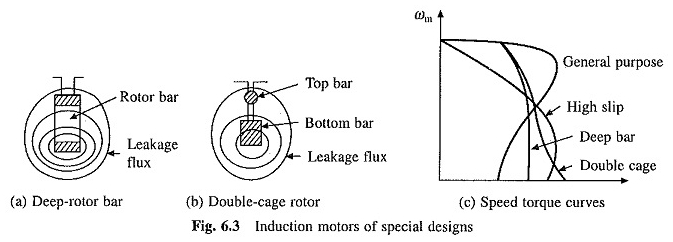
Przepływy upływu szczeliny wytwarzane przez prąd w pręcie są również zilustrowane na rysunku. Można sobie wyobrazić, że pręt jest wykonany z pewnej liczby wąskich warstw połączonych równolegle. Porównajmy zachowanie górnych i dolnych warstw.
Większe połączenia przepływu upływu z dolną warstwą niż górna warstwa. W związku z tym dolna warstwa ma znacznie wyższą indukcyjność upływu niż górna warstwa. Ponieważ częstotliwość wirnika jest wysoka przy niskiej prędkości, reaktancja i impedancja dolnej warstwy są znacznie wyższe niż górna warstwa.
W związku z tym przy niskich prędkościach najwyższa ilość prądu jest transportowana przez najwyższą i najniższą warstwę na dole. Ze względu na nierówny rozkład prądu przez odcinek poprzeczny paska skuteczna oporność wirnika jest wysoka, a wydajność początkowa i przy niskiej prędkości ulepszona.
Przy prawie pełnej prędkości obciążenia częstotliwość prądu wirnika i reaktancja wycieków jest niska. W związku z tym prąd jest również rozłożony przez odcinek poprzeczny paska, a efektywna rezystancja wirnika ma niską wartość. Zatem nie wpływa znacząco na pełną wydajność obciążenia. Charakter krzywej prędkości silnika przedstawiono na rysunku 6.3 (c).
Silnik indukcyjny wirnika podwójnego wiewiórki:
Rotor składa się z dwóch warstw prętów kierowcy w każdej szczelinie (ryc. 6.3 (b)) zwarcia przez pierścienie końcowe. Górny pasek ma mniejszy odcinek poprzeczny niż dno. Dlatego ma wyższy opór.
Dolny pasek jest powiązany z większą ilością przepływów upływu niż górny pasek, a zatem ma wyższą indukcyjność. Przy niskiej prędkości, dla której częstotliwość wirnika jest wysoka, dolny pasek ma wyższą impedancję. Dlatego więcej prądu przecina górny pasek.
Ponieważ opór górnego paska uzyskuje się od dobrej wydajności start -up. Przy dużych prędkościach, dla których częstotliwość wirnika jest niska, dolny pasek ma znacznie mniejszą impedancję niż ten górny.
W związku z tym prąd wirnika jest transportowany głównie przez dolny pasek, a pełne obciążenie pozostaje dobre, ponieważ mają niski opór. Charakter charakterystyki prędkości przekładni przedstawiono na rysunku 6.3 (c).
Silnik momentu obrotowego:
Silniki zaprojektowane do działalności przez długi czas w stanie w standstill lub przy niskiej prędkości nazywane są silnikami momentu obrotowego. Zostały one zaprojektowane tak, aby rozwinąć pożądany moment obrotowy o niskiej prędkości przy niskiej prędkości.
Ich charakterystyki ich prędkości mają kształt ujemnego nachylenia, dzięki czemu zapewniają stabilne działanie z większością obciążeń o niskiej prędkości. Mogą być rodzajem rany typu wiewiórki lub wirnika. Dostępne są silniki indukcyjne i silniki pojedyncze w fazie.