Zasada silnika indukcyjnego | Charakterystyka ślizgania się momentem obrotowym:
Jak dotąd zasada silnika indukcyjnego nie została wprowadzona. Rozważ cylindryczną maszynę wirnika z stojanem i raną wirnika dla trzech faz i identycznej liczby biegunów, jak pokazano na rycinie 5.40.
Początkowo załóżmy, że wirnik wirnika jest w otwartym obwodzie i pozwól stojanowi podłączyć się do nieskończonej magistrali (V, F).
Prądy stojanowe zainstalowały obrotowe pole magnetyczne w szczelinie powietrznej, które działa przy synchronicznej prędkości indukującej emf w uzwojeniu stojana, który równoważy napięcie zacisku, zakładając, że oporność stojana i reakcja wycieków są nieistotne.
Pole obrotowe indukuje również EMF w uzwojeniu wirnika, ale nie krąży prąd wirnika, ponieważ wirnik znajduje się w otwartym obwodzie. Częstotliwość wirników EMF wynosi oczywiście f. Ponieważ wirnik MMF F2 = 0, nie opracowano żadnej pary, a wirnik nadal jest stacjonarny.
Zasada silnika indukcyjnego działa po prostu jako transformator, w którym stojan (pierwotny) i wirnik (wtórny) mają EMF o tej samej częstotliwości, które są w nim indukowane przez obrotowy przepływ magnetyczny, a nie przez przepływ zmienny w czasie, jak w zwykłym transformatorze.
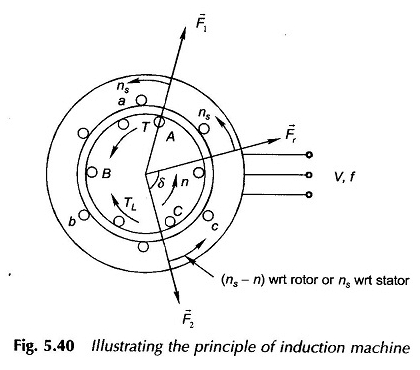 Że wirnik jest teraz utrzymywany stacjonarny (zablokowany z obrotu), a uzwojenie wirnika jest zwarte. Rotor przenosi teraz prądy bieżące, tworząc obrót MMF F2 w tym samym kierunku i z tą samą prędkością co pole stojanowe. F2 krąży prądy reakcyjne w stojanie z paska magistrali (tak jak w zwykłym transformatorze), tak że przepływ / biegun φr powstałego przepływu gęstości przepływu (obracanie się w prędkości synchronicznej) indukuje stojan EMF do zrównoważenia napięcia zacisku. Oczywiście φr musi być taki sam, jak gdy wirnik był w otwartym obwodzie. W rzeczywistości φr pozostanie stałym niezależnie od warunków pracy utworzonych przez obciążenie silnika. Interakcja φr i F2, które są stacjonarne, tworzy parę, która ma tendencję do przesuwania wirnika w kierunku FR lub pola stojana F1. Silnik indukcyjny jest zatem urządzeniem do samozachowawczego, różniącego się od silnika synchronicznego.
Że wirnik jest teraz utrzymywany stacjonarny (zablokowany z obrotu), a uzwojenie wirnika jest zwarte. Rotor przenosi teraz prądy bieżące, tworząc obrót MMF F2 w tym samym kierunku i z tą samą prędkością co pole stojanowe. F2 krąży prądy reakcyjne w stojanie z paska magistrali (tak jak w zwykłym transformatorze), tak że przepływ / biegun φr powstałego przepływu gęstości przepływu (obracanie się w prędkości synchronicznej) indukuje stojan EMF do zrównoważenia napięcia zacisku. Oczywiście φr musi być taki sam, jak gdy wirnik był w otwartym obwodzie. W rzeczywistości φr pozostanie stałym niezależnie od warunków pracy utworzonych przez obciążenie silnika. Interakcja φr i F2, które są stacjonarne, tworzy parę, która ma tendencję do przesuwania wirnika w kierunku FR lub pola stojana F1. Silnik indukcyjny jest zatem urządzeniem do samozachowawczego, różniącego się od silnika synchronicznego.
Niech zwarcie wirnika będzie teraz obrócić. Działa w kierunku pola stojana i nabiera stałej prędkości N. Oczywiście n 
Prędkość jednostki slajdów (w porównaniu z prędkością synchroniczną), do której wirnik przesuwa się za polem stojana. Częstotliwość wirnika F2 = SF nazywa się częstotliwością przesuwaną. Równania. (5.66), prędkość wirnika wynosi
![]()
Prądy częstotliwości szkicu w uzwojeniu wirnika powodują pole wirnika wirnika w stosunku do wirnika w tym samym kierunku, co pole stojana z prędkością

Ponieważ wirnik działa z prędkością n i pola wirnika w (ns – n) w porównaniu z wirnikiem w tym samym kierunku, prędkość netto pola wirnika widoczna z stojana (odniesienie do ziemi) wynosi
![]()
To znaczy, to samo co pole stojana. Zatem pole reakcji F2 wirnika jest zawsze stacjonarne w porównaniu do pola stojana F1 lub powstałego pola FR (z przepływem φr przez biegun). Ponieważ MMF wirnika F2 jest proporcjonalny do prądu wirnika I2 i że przepływ / biegun wynikowy φr jest ustalany przez napięcie końcowe niezależne od warunków pracy, moment obrotowy silnika indukcyjnego podano przez (patrz równ.
![]()
Obserwujemy tutaj, że moment obrotowy jest wytwarzany przez silnik indukcyjny z dowolną prędkością mechaniczną inną niż synchroniczna; Taka para nazywa się parą asynchroniczną.
Kąt δ, za pomocą którego F2 spóźnia się na FR, powstały MMF musi być znany. Przed ustaleniem δ należy zauważyć, że zwarcie uzwojenia wirnika jest równoważne z zwarciem wszystkich sterowników indywidualnego uzwojenia.
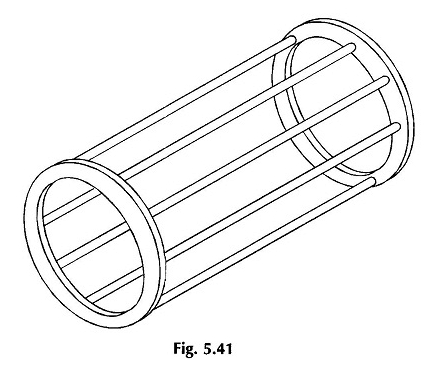
W związku z tym wirnik niekoniecznie powinien być odpowiednio zwinięty; Można go zbudować do wykonania prętów umieszczonych w wirniku i zwarciu szczelin, tworząc pierścienie końcowe po każdej stronie wirnika.
Taki wirnik nazywa się wirnikiem klatki wiewiórki; Klatka przewodzącego jest zilustrowana osobno na rysunku 5.41. Rotor wiewiórki ma tanie i solidne budownictwo i jest przyjmowany w znacznej większości zastosowań silników indukcyjnych.
Zasada silnika indukcyjnego z odpowiednio zwiniętym wirnikiem nazywa się silnikiem indukcyjnym wirnika i jest dostarczana z trzema przesuwnymi pierścieniami, które zapewniają instalację, aby dodać zewnętrzny opór uzwojenia wirnika przed ich wyeliminowaniem. Silniki te są używane w sytuacjach ładowania odpowiedzialnych.
Zwykle pełne przesuwanie obciążenia silnika indukcyjnego wiewiórki jest 3 do 10%małe. W konsekwencji impedancja wirnika jest głównie rezystancyjna, reaktancja napadów wirnika jest proporcjonalna do F2 = SF jest znikoma. Ponadto indukuje EMF przez wirnik, jest proporcjonalny do ślizgania się wirnika, ponieważ φr jest ustalona i obraca się z prędkością ns – n = sNS w porównaniu z wirnikiem.
W rezultacie prąd wirnika jest prawie w linii z wirnikiem EMF i proporcjonalny do przesuwania wirnika. Wniosek ten miałby oczywiście również zastosowanie do poszczególnych kierowców wirników.
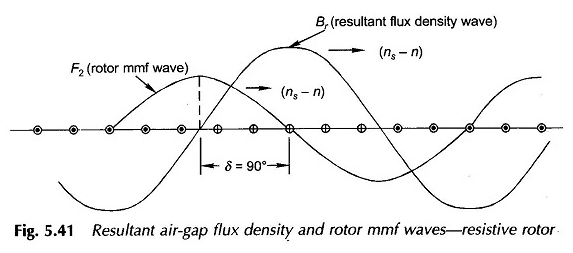
Rysunek 5.42 pokazuje oporną na rezydenta falę gęstości przepływu szczotkowania przed sterownikami wirnika z prędkością (NS – N) = SNS na rozwiniętym schemacie.
Prądy indukowane w zwarciu sterowników wirników są rozłożone poruszania się sinusoidalnie dystrybucji z prędkością (NS-N) w porównaniu z wirnikiem w synchronizmie z BR. Więcej, ponieważ kierowcy wirników powinni być podsumowani, to znaczy
Prądy w nich są zgodne z odpowiednimi EMF, rozkład prądu wirnika znajduje się w fazie przestrzeni z BR-Wave. Rozkład sinusoidalnego prądu wirnika wytwarza sinusoidalną falę wirnika wirnika F2, która znajduje się 90 ° za rozkładem prądu wirnika lub 90 ° za falą brutto.
Stwierdzono zatem, że dla małych wartości przesuwnych kąt w silniku indukcyjnym wynosi 90 °. Więc,

Ponieważ wirnik EMF jest liniowo proporcjonalny do poślizgu, prąd wirnika jest również głównie rezystancją wirnika na małe wartości ślizgowe. W związku z tym moment obrotowy rozwinięty w silniku indukcyjnym jest coraz bardziej liniową funkcją przesunięcia dla niewielkiej wartości przesuwnej, wynoszącą zero dla s = 0, to znaczy z synchroniczną prędkością.
W miarę wzrostu zmiany nie można już przeoczyć reaktancji wycieków wirnika. Jego wartość poślizgu to SX2, gdzie x2 jest reaktancją wycieków wirnika przez fazę przy częstotliwości F, to znaczy, gdy wirnik jest na stoisku. Prąd wirnika jest teraz opóźniony za indukowaniem EMF

gdzie R2 jest odpornością na wirnik na fazę.
Ponieważ prądy w sterownikach wirnika przeciągają EMF indukowane kątem θ, rozkład prądu sterownika wirnika, a zatem wirnik MMF F2 przesuwa się w lewo na rysunku 5.40 na ryc.
![]()
Oznacza to sin δ <1. Ponadto, ponieważ impedancja wirnika wzrasta wraz z S, prąd wirnika jest daleki od proporcjonalnego do przesunięcia. Te dwa czynniki powodują przejście momentu obrotowego silnika przez maksymalną wartość, a następnie zaczynają stopniowo zmniejszać się wraz ze wzrostem S.
Charakter całkowitej charakterystyki przesunięcia momentu obrotowego w silniku indukcyjnym przedstawiono na rycinie 5.43. Maksymalny moment obrotowy jest znany jako moment obrotowy pęknięcia. Silnik spoczywałby, gdyby został załadowany poza krótki czas z obciążeniem momentu obrotowego większym niż wartość awarii.
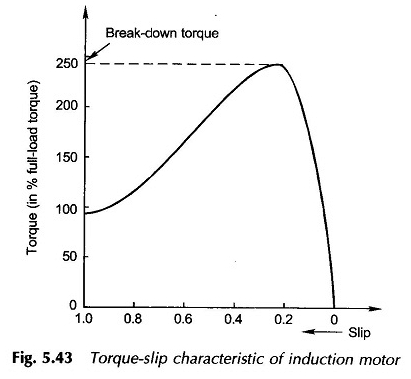
Jak już wspomniano, przesuwanie silnika indukcyjnego wynosi od 3 do 10% przy pełnym obciążeniu. W związku z tym jest to znacznie stałą prędkość, w przeciwieństwie do silnika synchronicznego, który działa ze stałą prędkością niezależną od obciążenia.
Wytwarzanie wyników działania, jeśli zasada silnika indukcyjnego jest wykonywana przy ujemnej przesunięciu lub przy prędkości n> ns, to znaczy z prędkością powyżej synchronicznej.