Zmienna kontrola częstotliwości napędu silnika indukcyjnego:
Zmienna kontrola częstotliwości napędu silnika indukcyjnego – prędkość synchroniczna, dlatego prędkość silnika można kontrolować za pomocą zmiennej częstotliwości zasilania. Napięcie indukowane w stojanie jest proporcjonalne do produktu częstotliwości zasilania i przepływu powietrza.
Jeśli upadek stojana zostanie zaniedbany, napięcie zacisku można uznać za proporcjonalne do produktu częstotliwości i przepływu.
Wszelkie zmniejszenie częstotliwości zasilania, bez zmiany napięcia końcowego, powoduje wzrost przepływu powietrza. Silniki indukcyjne są zaprojektowane do działania w punkcie kolan charakterystycznym magnetyzacji w celu pełnego wykorzystania materiału magnetycznego.
Dlatego wzrost przepływu nasyci silnik. Zwiększy to prąd magnetyzacji, odkształci prąd i napięcie linii, zwiększy utratę jądra i utratę miedzi stojana i spowoduje hałas akustyczny w wysokim kominku.
Chociaż wzrost przepływu poza ocenianą wartość jest niepożądany po uwzględnieniu efektów nasycenia, unika się również spadku przepływu w celu utrzymania pojemności momentu obrotowego silnika.
W związku z tym kontrola zmiennej częstotliwości napędu silnika indukcyjnego poniżej częstotliwości nominalnej jest zwykle przeprowadzana przy nominalnym przepływu powietrza przez zmienne napięcie zaciskowe o częstotliwości w celu utrzymania stałej stosunku (v / f) do wartości nominalnej. Równania. (6.13)
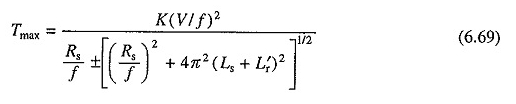
Gdzie k jest stałym, a LS i L 'są odpowiednio, stojan i stojan skierowały indukcyjności wirnika. Znak pozytywny dotyczy funkcjonowania samochodu, a znak ujemny służy do operacji hamowania.
Gdy częstotliwość nie jest niska, (RS / F) ≪ 2π (LS + L ′ R), a zatem z (6,69)

Równanie (6.70) sugeruje, że przy stałym stosunku (v / f) silnik rozwija stały maksymalny moment obrotowy, z wyjątkiem niskiej prędkości (lub częstotliwości). Dlatego silnik działa w trybie stałego momentu obrotowego. Według równania.
(6.69), dla niskich częstotliwości (lub niskich prędkości) z powodu oporu stojana [to znaczy, kiedy (RS / F) nie jest nieistotne w porównaniu z 2π (LS + L ′ R)] Maksymalny moment obrotowy będzie miała niższą wartość w funkcji silnika (znak -eve) i większą wartość w funkcjonowaniu hamowania (oznaczenie).
To zachowanie wynika ze zmniejszenia przepływu podczas działania samochodu i wzrostu przepływu podczas funkcjonowania hamowania. Gdy konieczne jest, aby ten sam maksymalny moment obrotowy był utrzymywany z niską prędkością również w działaniu samochodu, stosunek (v / f) zwiększa się przy niskiej częstotliwości.
Powoduje to dodatkowy wzrost maksymalnego momentu hamowania i znaczne nasycenie maszyny podczas funkcjonowania hamowania.
Kiedy masz lub osiągniesz wartość nominalną przy podstawowej prędkości, nie można jej zwiększyć wraz z częstotliwością. Dlatego powyżej podstawowej prędkości częstotliwość jest modyfikowana stałą v. Zgodnie z równaniem. (6,70), ze stałą V, maksymalny moment obrotowy maleje wraz ze wzrostem częstotliwości (lub prędkości).
Zmienność napięcia końcowego o częstotliwości jest zatem, jak pokazano na rysunku 6.33 (a). V jest utrzymywane na stałym poziomie powyżej podstawowej prędkości. Poniżej podstawowego współczynnika prędkości (v / f) jest utrzymywane na stałym poziomie, z wyjątkiem niskiej częstotliwości, w której stosunek (v / f) jest zwiększony w celu utrzymania maksymalnego stałego momentu obrotowego.
Odpowiednie krzywe momentu obrotowego przedstawiono na rysunku 6.33 (b) zarówno dla operatorów rękawa, jak i hamowania. Krzywe sugerują, że kontrola prędkości i hamowanie są dostępne z prędkością z prędkością synchroniczną.

Dany moment obrotowy uzyskuje się z niższym prądem, gdy operacja przy dowolnej częstotliwości jest ograniczona między prędkością synchroniczną a maksymalnym punktem momentu obrotowego, zarówno dla operacji automatycznych, jak i hamowania.
W związku z tym działanie silnika dla każdej częstotliwości jest ograniczone między prędkością synchroniczną a maksymalnym punktem momentu obrotowego, jak pokazano w pełnych liniach z rysunku 6.33 (b).
Zmienna kontrola częstotliwości napędu silnika indukcyjnego oferuje dobrą wydajność operacyjną i przejściową ze względu na następujące cechy:
- Kontrola prędkości i działanie hamowania są dostępne od prędkości zerowej do górnej podstawowej prędkości.
- Podczas stanów przejściowych (uruchamianie, hamowanie i odwrócenie prędkości) operację można przeprowadzić przy maksymalnym momencie obrotowym o zmniejszonym prądu, co daje dobrą dynamiczną odpowiedź.
- Straty miedzi są niskie, a wydajność i współczynnik mocy są wysokie, ponieważ operacja jest ograniczona między prędkością synchroniczną a maksymalnym punktem momentu obrotowego na wszystkich częstotliwościach.
- Spadek prędkości braku pełnego obciążenia jest niewielki.
Najważniejszą zaletą zmiennej kontroli częstotliwości silnika indukcyjnego jest to, że umożliwia on zmienny napęd o dobrej funkcji roboczej i wydajności przejściowej powyżej z silnika indukcyjnego klatki wiewiórkowej.
Silnik klatki wiewiórki ma szereg zalet w porównaniu do silnika DC. Jest niedrogi, solidny, niezawodny i trwały.
Z powodu braku przełącznika i szczotek wymaga praktycznie żadnej konserwacji, można go wykorzystać w środowisku wybuchowym i zanieczyszczonym i może być zaprojektowany do wyższych prędkości, napięć i wymiarów energii. Ma również niższą bezwładność, objętość i wagę.
Chociaż koszt silnika klatki wiewiórki jest znacznie niższy w porównaniu z ciągłym silnikiem prądu o tej samej nucie, ogólny koszt szkolenia silnika indukcyjnego silnika jest ogólnie wyższy.
Ale ze względu na wymienione powyżej zalety, czytniki silników indukcyjnych o zmiennej częstotliwości są preferowani od dysków silnika CC dla większości aplikacji.
W specjalnych zastosowaniach wymagających bezobsługowego działania, takich jak instalacje podziemne i podwodne, a także w aplikacjach obejmujących środowiska wybuchowe i zanieczyszczone, podobnie jak w kopalniach i branży chemicznej, czytniki silników o zmiennej indukcji częstotliwości są naturalnym wyborem.
Mają kilka innych aplikacji, takich jak trakcja, stoły młyna, roboty stalowe, pompy, wentylatory, dmuchawy, sprężarki, kicie, przewoźnicy, maszynowe narzędzia itp.
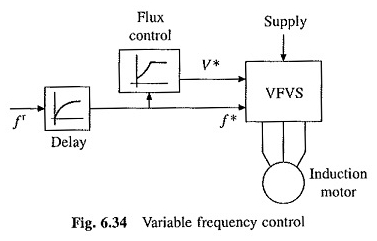
Schemat blokowy zmiennej kontroli częstotliwości schematu jazdy silnika indukcyjnego pokazano na rysunku 6.34. Silnik jest dostarczany ze zmiennego źródła napięcia o zmiennej częstotliwości (VFV). V * i F * są kontroli napięcia i częstotliwości dla VFV.
Blok kontroli przepływu wytwarza polecenie napięcia V * dla VFVS w celu utrzymania związku z rysunku 6.33 (a) między V * i F *. Częstotliwość odniesienia F * jest modyfikowana z prędkością sterującą.
Obwód opóźnienia jest wprowadzany między F * i FR, tak że nawet gdy FT jest modyfikowana przez dużą ilość, F * zmieni się tylko powoli, aby prędkość silnika mogła przestrzegać zmian FT, ograniczając w ten sposób operację silnika dla każdej częstotliwości między prędkością synchroniczną a maksymalnym punktem momentu obrotowego. VFV mogą być falownikiem źródłowym lub cyklokonwerterem.
Kontrola prędkości prędkości:
Niech V i F będą napięciem nominalnym i częstotliwością maszyny. Gdy silnik jest używany poniżej prędkości podstawowej o stałej kontroli (v / f), dla częstotliwości kf napięcie końcowe wyniesie kv, gdzie k jest czynnikiem takiego jak 0 ≤ k ≤ 1. Zatem, ponieważ częstotliwość wzrosła od 0 do f, k przechodzi od 0 do 1 i że zmienia się napięcie od 0 do V.
Zastępowanie napięcia KV i częstotliwości KF i zaniedbanie oporu stojana, równania (6.4) i (6.10)
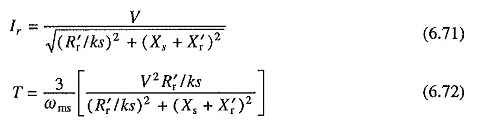
W równaniach. (6.71) i (6.72) Jeśli (KS) jest utrzymywane stałe, ponieważ k jest zróżnicowane, wówczas prąd wirnika I’R i para T pozostanie stała. Ponieważ zmiana jest niewielka, R będzie zgodny z napięciem. Ponieważ przepływ jest stały, IM również będzie stały. TERAZ
![]()
Zatem, jeśli działanie silnika jest przeprowadzane o stałej wartości KS w miarę zmienności częstotliwości, silnik będzie działał na stałych prądu i momencie obrotowym. Sprawdźmy znaczenie KS.
Przy częstotliwości KF
Uwaga ωst to prędkość poślizgowa, która jest różnicą w prędkości pola obrotowego Kωms i prędkości wirnika ωm. Jest to również spadek prędkości silnika jego obciążenia bez obciążenia, gdy maszyna jest ładowana.
Powyższa dyskusja pokazuje. Że dla każdej wartości T spadek prędkości silnika z prędkości obciążenia (Kωms) jest taki sam dla wszystkich częstotliwości. Dlatego charakterystyka momentu prędkości maszyny dla 0
Funkcjonowanie maszyny przy stałej prędkości przesuwnej obejmuje również działanie przy stałej częstotliwości wirnika, jak wskazano poniżej

gdzie FR i ωR są odpowiednio częstotliwością wirnika w HZ i RAD / s.
Dla s> (xs + x′r), a zatem z równań. (6.72) i (6.73)

Eqn. (6.76) sugeruje, że dla s
W zależności od powyższej dyskusji, dla prędkości przesuwnej prąd silnika i moment obrotowy mają te same wartości na wszystkich częstotliwościach. W ten sposób prąd silnika i moment obrotowy można kontrolować poprzez kontrolowanie prędkości przesuwnej.
Ponadto prąd silnika może być ograniczony w granicach bezpieczeństwa, ograniczając prędkość przesuwną. To zachowanie jest używane w zamkniętej kontroli prędkości pętli w celu ograniczenia prądu w ramach upoważnionego limitu.
Następnie rozważmy operację powyżej podstawowej prędkości. Jak wskazano wcześniej, maszyna działa na stałym napięciu V.

Ponieważ częstotliwość jest większa niż nuta k> 1. Ponieważ operacja jest ponownie ograniczona między prędkością synchroniczną a maksymalnym momentem obrotowym, przesunięcie ma niewielką wartość, dlatego

Zatem dla prędkości powyżej prędkości podstawowej, do danej, a zatem w przybliżeniu do darowizny, prędkość poślizgowa ωsl wzrasta liniowo z K (lub częstotliwość). To zachowanie jest używane w zamkniętej kontroli prędkości pętli, aby ograniczyć prąd w autoryzowanej wartości powyżej podstawowej prędkości.
Ponieważ przesunięcie jest niewielkie, R jest zgodne z V. Jeśli utrata maszyny jest zaniedbana, rozwinięta moc jest podana przez
![]()
Dlatego PM jest stały dla danego, a zatem dla IS. Czytelnik działa zatem w trybie stałego zasilania.
Ograniczenia momentu obrotowego i mocy oraz tryby pracy:
Zmiany momentu obrotowego i mocy dla danego prądu stojana oraz dla częstotliwości poniżej i powyżej częstotliwości nominalnej są reprezentowane przez punkty na rysunku 6.35.
Gdy prąd stojana ma maksymalną autoryzowaną wartość, będą one reprezentować maksymalny moment obrotowy i pojemności zasilania silnika w zmiennej kontroli częstotliwości napędu silnika indukcyjnego.
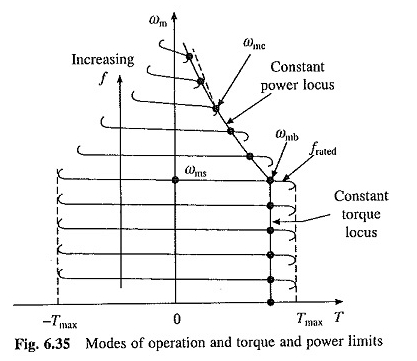
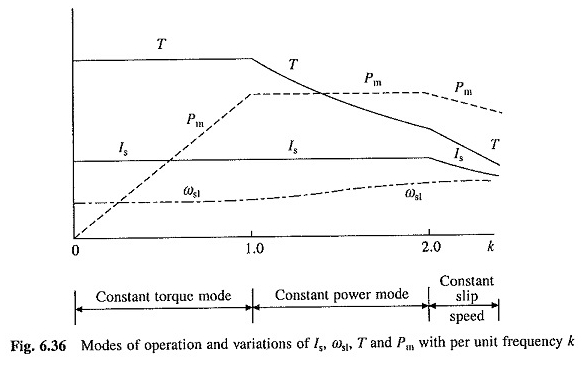
Zmienność maksymalnego momentu obrotowego i mocy z częstotliwością przedstawiono na rysunku 6.36. Zmienność prędkości przesuwnej ωsl z częstotliwością jest również reprezentowana na tym rysunku.
Jak pokazano na ryc. 6.35 i 6.36, silnik ma stały maksymalny moment obrotowy od zera do podstawowej prędkości ωmm, więc czytnik działa w trybie stałego momentu obrotowego. W tym zakresie częstotliwości V jest modyfikowane z częstotliwością, jak pokazano na ryc.
6.33 (a), a prędkość maksymalnego autoryzowanego prądu pozostaje stała. Od podstawowej prędkości do prędkości ωMC maksymalna moc ma stałą wartość, więc silnik działa w trybie stałej mocy. Przy prędkości ωMC (ryc. 6.35) osiąga się moment niepowodzenia.
Każda próba obsługi silnika w maksymalnym autoryzowanym prądzie wykraczającym poza tę prędkość pomieści silnik. W konsekwencji, poza prędkością ωMC, maszyna działa ze stałą prędkością przesuwną, a maksymalny prąd upoważniony, a maksymalna moc może zmniejszyć się (ryc. 6.36).
Teraz prąd silnika zmniejsza się odwrotnie wraz z prędkością, a moment obrotowy zmniejsza się odwrotnie, gdy prędkość jest kwadratowa. Działanie w tym regionie jest wymagane na dyskach wymagających szerokiego zakresu prędkości, ale niski moment obrotowy przy dużych prędkościach.
Na przykład w aplikacjach trakcyjnych czytnik działa w tym regionie, gdy działa z pełną prędkością, ponieważ moment obrotowy wymagany w równowadze o dużej prędkości jest bardzo niski w porównaniu z jego wartością podczas przyspieszenia.