Zorientowana część kontroli trzy -fazowej silnika indukcyjnego:
Prąd stojany silnika indukcyjnego zawiera funkcje produkcyjne wymaganego przepływu przestrzeni powietrznej (magnetyzacja), a także opracowanie wymaganego momentu obciążenia.
Kontrolowana kontrola silnika indukcyjnego trójfazowego będzie miała działanie podobne do działalności silnika prądu ciągłego, jeśli komponenty prądu stojana (mianowicie produkcja przepływu i produkcja momentu obrotowego) można kontrolować osobno.
Ten rodzaj kontroli jest możliwy w podekscytowanym silniku CC osobno, gdzie moment obrotowy i przepływ można kontrolować osobno i niezależnie, zmieniając odpowiednio wzmacniające i prąd pola.
Między nimi istniałoby nieodłączne oddzielanie, ale w przypadku skutków reakcji wzmocnienia. Efekty te można wyeliminować poprzez odszkodowanie za wzmocnienie. Idealne odsprzężenie można uzyskać w podekscytowanym silniku CC osobno zapłaconym.
Ta wszechstronna kontrola zapewnia bardzo dobre zachowanie dynamiczne silnikowi prądu ciągłego. W ten sposób uzyskano wysoką wydajność z wykorzystaniem kontroli silnika indukcyjnego z trzema fazą poprzez próbę oddzielenia bieżących elementów stojana.
Zasada ta nazywa się kontrolą orientacji pola lub kontroli wektora. Ta kontrola poprawia dynamiczne zachowanie i bardzo dobry trening wydajności można uzyskać nawet przy niskiej prędkości.
Dwa elementy prądu są zidentyfikowane i są odpowiednio zorientowane w zamówieniach ortogonalnych w porównaniu z wektorem przepływu.
Obecne elementy można zorientować w stosunku do jednego z trzech przepływów, a mianowicie przepływu stojana, przepływu przestrzeni powietrznej lub przepływu wirnika.
Analiza pokazuje, że dynamiczna wydajność czytelnika nie jest na pożądanym poziomie, jeśli orientacja jest przeprowadzana w porównaniu z stojanem lub przepływem przestrzeni powietrznej. To dynamiczne złe zachowanie wynika z opóźnienia pary poprzez zmianę zmiany.
Możliwe jest naturalne i skuteczne odsprzężenie, jeśli orientacja jest przeprowadzana w porównaniu z przepływem wirnika, prowadzi to do wysokiej kontroli momentu obrotowego w sprawie jazdy z bardzo szybką reakcją. Wdrożenie zasady orientacji w terenie pokazano na rycinie 8.11.
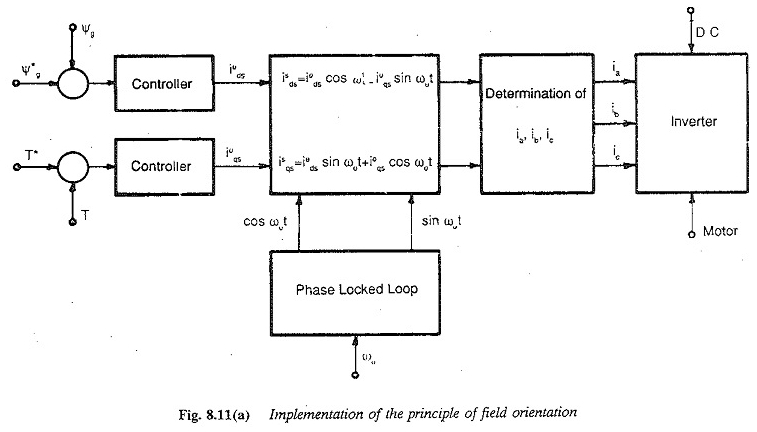
 Kiedy zasugerowano zasadę orientacji w terenie, nie zwróciła uwagi na przemysł i nie był zbyt popularny ze względu na skomplikowany sprzęt. Wraz z rozwojem komponentów cyfrowych i mikroprocesorów poprzez LSI i miniaturyzację komponentów, popularna staje się ta wysoka kontrola kontroli sterowania trzypoziomowego silnika indukcyjnego. Głównym dziedziną zastosowania i efektywnego wykorzystania mikroprocesorów o wysokiej prędkości jest kontrola wektorowa kontrolowanej kontroli w silniku indukcyjnym z trzema fazą. Ta kontrola wymaga
Kiedy zasugerowano zasadę orientacji w terenie, nie zwróciła uwagi na przemysł i nie był zbyt popularny ze względu na skomplikowany sprzęt. Wraz z rozwojem komponentów cyfrowych i mikroprocesorów poprzez LSI i miniaturyzację komponentów, popularna staje się ta wysoka kontrola kontroli sterowania trzypoziomowego silnika indukcyjnego. Głównym dziedziną zastosowania i efektywnego wykorzystania mikroprocesorów o wysokiej prędkości jest kontrola wektorowa kontrolowanej kontroli w silniku indukcyjnym z trzema fazą. Ta kontrola wymaga
- Dokładne informacje na temat przepływu wirnika.
- Dokładna regulacja elementów prądowych stojana jako funkcja odniesienia.
Funkcje mikroprocesora w kontroli wektora silnika indukcyjnego są następujące:
- Leczenie sygnałów uzyskanych z kodera drzewa w celu określenia prędkości wirnika, a także kąta wirnika. Ten kąt wirnika powinien być używany w transformacjach z jednej ramki do drugiej.
- Oszacowanie przepływu za pomocą napięć, prądów i prędkości zacisków, w zależności od jednego z modeli maszyn.
- Obliczenia dotyczące fazy i koordynują transformacje w celu zidentyfikowania dwóch składników prądu. Po niezbędnej kontroli składniki te muszą zostać przekształcone, aby zapewnić wartości odniesienia do porównania z rzeczywistymi prądami fazowymi.
- Pętle prędkości i prądu w kontroli sprzężenia zwrotnego. Wdrożenie kontrolerów w tych pętlach.
- Aby wytworzyć sygnały siatki dla konwertera po stronie maszyny i po stronie linii, konwerter po stronie maszyny decyduje o częstotliwości, podczas gdy strona linii decyduje o prądu / napięciu. Sygnały strzelania do konwertera linii bocznej są uzyskiwane w taki sam sposób, jak opisano dla podwójnego konwertera. Sygnały strzelania do konwertera po stronie maszyny decydują o częstotliwości. Prędkość sterowania zorientowana na polu silnika indukcyjnego z trzema fazą jest dodawana do wyjścia kontrolera przesuwnego, aby zdecydować o częstotliwości wyjścia falownika. Dodatek musi być precyzyjny, ponieważ duża ilość jest dodawana do małej. Cyfrowy dodatek do mikroprocesora jest precyzyjny. Mikroprocesor musi zatem być w stanie zapewnić lub generować sygnały strzelania do konwertera po stronie maszyny.
- Pozyskiwanie danych Mikroprocesor musi uzyskać sygnały sprzężenia zwrotnego w formie cyfrowej. Wymagane jest przesyłanie danych do procesora. Wymagany jest przepływ danych z procesora i procesora.
- Ograniczanie funkcji liniowych zmiennych kontrolnych stosowanych w zachowaniu kontrolnym, a także nieliniowym zachowaniu konwertera podczas nieciągłego przewodzenia. Odszkodowanie za zmienne wzmocnienie podczas nieciągłych trybów przewodzenia i osłabienia pola.
Operacje matematyczne obejmują mnożenie, podział, dodanie i odejmowanie. Mikroprocesor arytmetyczny jednostka przetwarzania musi być w stanie przeprowadzić te operacje.
Ocenianie przepływu można przeprowadzić za pomocą integracji cyfrowej przy użyciu dobrze znanej reguły Simpsona lub reguły trapezoidalnej. Ale wyniki cierpią na utratę precyzji z powodu błędów obcięcia w ośmiu procesorach. Błędy te prowadzą do niestabilności operacji.
Użyj I Floating Command z podwójną precyzją poprawia wydajność procesora. Wymaga to jednak długiego okresu obliczeń. Aby zmniejszyć obciążenie mikroprocesora, oszacowanie przepływu można przenieść przez modele analogowe zewnętrzne do procesora.
Obliczony przepływ można leczyć w procesorze. Wartości odniesienia prądów i przepływów są opracowywane przez procesor.
W zależności od prędkości procesora i jego zdolności do wypełniania powyższych funkcji można ustalić granicę między lokalnym sprzętem a mikroprocesorem, aby wypełnić funkcje.
Czasami kontrola wielu produktów można przeprowadzić w zależności od prędkości i jakości wymaganej kontroli.
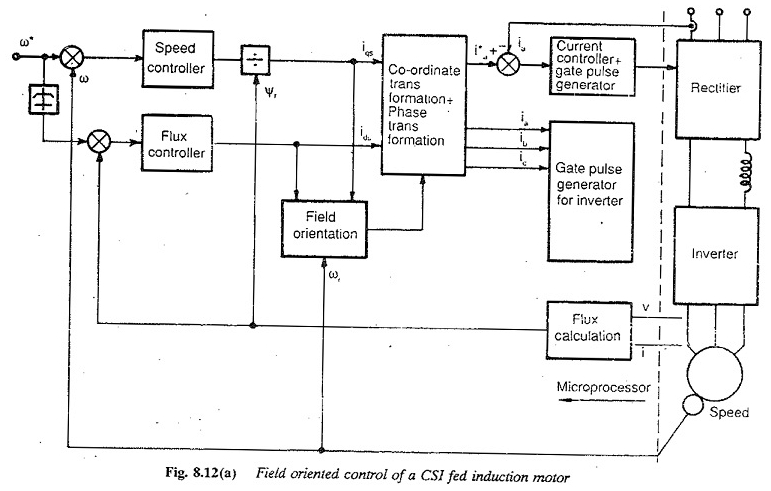
Orientacja na ziemi jest możliwa z falownikiem źródła napięcia, a także kontrolą prądu źródła prądu dostarczonego przez pole trzech fazy silnika indukcyjnego. Obecny falownik źródłowy jest szeroko stosowany ze względu na prostotę jego obwodu mocy.
Charakterystykę kontroli kontrolnej za pomocą CSI omówiono tutaj (8.12 (a)). Czasami falownik PWM może być odpowiednio kontrolowany, aby zapewnić prądy referencyjne (ryc. 8.12 (b)). Kontrola tej można wykonać za pomocą mikroprocesora.

Przepływ można zmierzyć bezpośrednio za pomocą cewek badawczych lub sond hall. Sygnały analogowe są przekształcane w cyfrowe na odżywianie się w mikroprocesorze w celu późniejszego leczenia.
Ta bezpośrednia miara, nawet jeśli teoretycznie dokładna, ma następujące ograniczenia lub trudności: obecność wrażliwych sond pokojowych lub cewek wyszukiwania sprawia, że silnik indukcyjny jest bardziej wrażliwy, ale jego nieodłączna niezawodność jest utracona.
Zmierzony sygnał jest nałożony przez harmoniczne szczelinowe wymagające filtrowania. Pomoc pomiaru i konwersji błędy sprawiają, że wyniki są niezbyt wiarygodne. Dlatego zwykle stosuje się obliczenia FLWC za pomocą modeli maszyn (szacunek pośredni).
Te modele maszyn do obliczania przepływu wykorzystują kontrolę zorientowaną na ziemię trzech parametrów silnika indukcyjnego fazy określonych na podstawie testów wirnika bez obciążenia i zablokowanych. Niedokładność; Wśród modeli w oszacowaniu parametrów zmienność maszyny!
Parametry spowodowane temperaturą i nasyceniem muszą być dokładnie uwzględnione w oszacowaniu. Precyzja jest zmieniana w przypadku integracji zaangażowanej w oszacowanie. Dzieje się tak, jeśli napięcie i prędkość zostaną użyte w obliczeniach.
Przy niskiej prędkości integracja wprowadza znaczne błędy w tych błędach, a niezawodną wydajność można popełnić na szerokim zakresie przystanków na przystanku.
Aby poprawić wydajność, ustawienia maszyny używane w modelu muszą być tak precyzyjne, jak to możliwe. W przeciwnym razie można je poprawić za pomocą procesu korekcji, aby możliwe było dokładne sprzężenie. Proces korekty poprawia parametr.
Oszacowanie przepływu pośredniego, a także identyfikacji lub adaptacji znanej jako parametry są używane do uzyskania silnika indukcyjnego z doskonałym sprzężeniem.
Szacowany przepływ z rzeczywistych wykrytych zmiennych prądu i prędkości z parametrami jest porównywany z wartością odniesienia (określoną na podstawie wielkości odniesienia). Różnica służy do skorygowania parametrów maszyny wprowadzających obliczenia.
Najbardziej wpływowym parametrem jest rezystancja wirnika lub stała czasowa wirnika i jest on korygowany, aż model wymagany przepływ.
Jedynym rozwiązaniem kontroli zorientowanej na teren z adaptacją parametrów jest zastosowanie mikroprocesorów lub mikrokomputerów. W literaturze dostępnych jest kilka technik dostosowywania parametrów. Taki schemat pokazano na rycinie 8.13.
Mikroprocesor musi przeprowadzić operacje matematyczne, aby oszacować przepływ zarówno wartości odniesienia, jak i zmiennych zmierzonych.

Wybór mikroprocesora dla powyższej aplikacji może opierać się na następujących kwestiach:
- Rozwiązanie nagrody dla kontrolowanego prostownika w fazie. Rozdzielczość decyduje o asymetrii podczas strzelania.
- Operacje matematyczne, które można przeprowadzić. Powinien być zdolny do arytmetyki binarnej i dziesiętnej, w tym mnożenie i podział
- Wymagana pojemność pamięci
- Generowanie zegara wewnętrznego
- Zarządzanie oprogramowaniem do wdrażania kontrolerów, ograniczników itp.
- Zdolność przerw
Niektóre inne zastosowania mikroprocesora w kontroli silników indukcyjnych to:
- Mikroprocesor można użyć do kohtrolowania prędkości za pomocą kontrolera napięcia
- Można go użyć do kontrolowania prędkości za pomocą schematu odzyskiwania energii przesuwnej. Kontrola werctorów można również użyć tutaj.
- Może być używany do kontrolowanego czytnika kontrolowanego z przepływem i kontrolą momentu obrotowego w szkoleniu Fed CSI.
- Może być stosowany do wdrożenia technik PWM w celu kontrolowania napięcia i harmonicznych zarówno w silnikach indukcyjnych VSI, jak i CSI.
- Można go użyć do kontrolowania cyklokonwerteru.