Changement de poteau du moteur à induction:
Changement de poteau du moteur d’induction – Pour une fréquence donnée, la vitesse synchrone est inversement proportionnelle au nombre de pôles. Vitesse synchrone, et par conséquent, la vitesse du moteur peut être modifiée en modifiant le nombre de pôles.
Les dispositions de modification du nombre de pôles doivent être incorporées au stade de fabrication et ces machines sont appelées «moteurs à changement de poteau» ou «moteurs à plusieurs vitesses».
Le rotor d’écureuil-cage n’est pas enroulé pour un nombre spécifique de pôles. Il produit le même nombre de pôles que l’enroulement du stator. Par conséquent, dans un moteur à cage d’écureuil, une disposition n’est requise que pour modifier le nombre de pôles dans le stator.
Dans le moteur du rotor des plaies, la disposition de modification du nombre de pôles dans le rotor est également requise, ce qui complique la machine. Par conséquent, ce changement de pôle de la méthode de contrôle du moteur d’induction n’est utilisé qu’avec des moteurs à cage d’écureuil.
Un arrangement simple mais coûteux pour modifier le nombre de poteaux stator consiste à utiliser deux enroulements stator séparés qui sont enroulés pour deux nombres de pôles différents. Une alternative économique et commune consiste à utiliser un seul enroulement de stator divisé en quelques groupes de bobines.
Le nombre de pôles est modifié en modifiant les connexions de ces groupes de bobines. Théoriquement en divisant l’enroulement en un certain nombre de groupes de bobines et en sortant des terminaux de tous ces groupes, un certain nombre de pôles peuvent être obtenus en reconnectant ces groupes.
En pratique, pour simplicité, l’enroulement n’est divisé que dans deux groupes de bobines. Cela permet le changement de numéro de pôle par un facteur 2. Un arrangement d’enroulement pour ce cas particulier est expliqué comme suit:
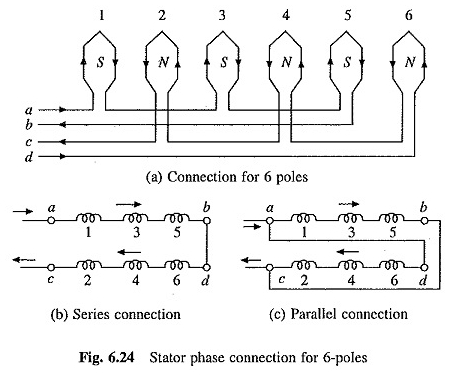
La figure 6.24 (a) montre un enroulement de phase composé de 6 bobines divisées en deux groupes AB composés de bobines impaires numérotées (1, 3, 5) connectées en série et CD de bobines uniformes (2, 4, 6) connectées en série.
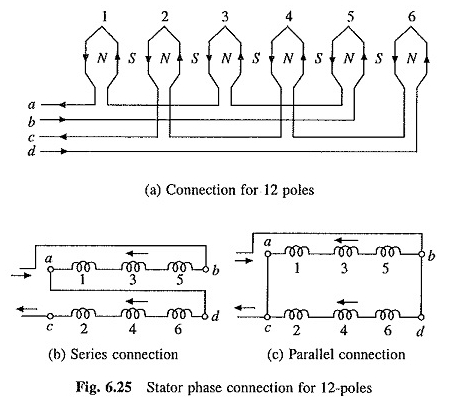
Les bobines peuvent être conçues pour transporter le courant dans les directions données en connectant les groupes de bobines en série ou en parallèle, illustré aux Fig. 6.24 (b) et (c), respectivement. Avec cette connexion, la machine a 6 pôles. Si le courant à travers les bobines du groupe AB est inversé (Fig. 6.25 (a)), toutes les bobines produiront des pôles nord. F
Les luxes sortant de ces pôles du Nord trouveront désormais le chemin à travers les espaces inter-pôles pour sortir, produisant par conséquent des pôles sud dans les espaces inter-pôles. Ainsi, la machine aura désormais 12 pistes.
Ici encore, la direction requise du courant à travers les bobines peut être obtenue en connectant les deux sections AB et CD en série ou en parallèle comme indiqué sur la figure 6.25 (b) et (c).
Ainsi, chaque phase de l’enroulement de la machine a deux groupes de bobines, AB et CD, qui peuvent être connectés en série ou en parallèle pour les deux pôles 6 et 12.
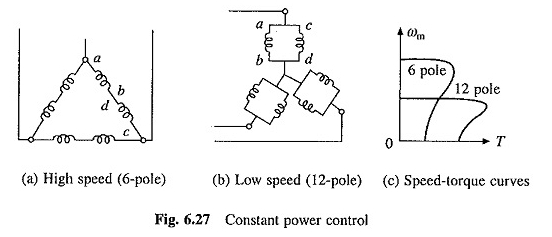
De plus, trois phases de la machine peuvent être connectées pour former une connexion delta ou étoile.
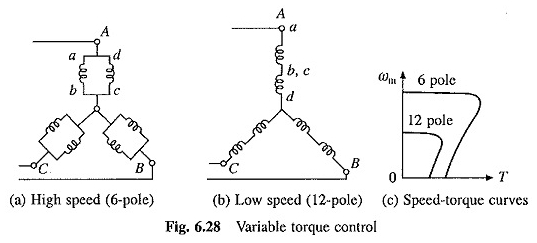
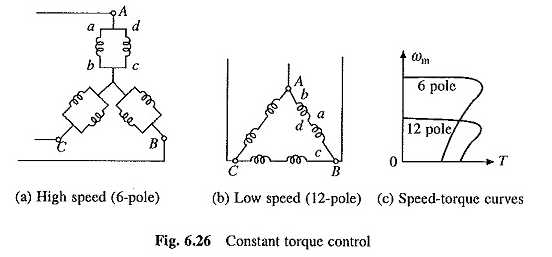
En choisissant une combinaison appropriée de connexions série ou parallèles entre les groupes de bobines de chaque phase et la connexion étoile ou delta entre les phases, le changement de vitesse peut être obtenu avec un fonctionnement de couple constant, un fonctionnement à puissance constante ou un opération de couple variable. Les connexions et les courbes de vitesse-Torque pour ces opérations sont représentées sur les Fig. 6.26 à 6.28.