Controle de velocidade do motor de indução:
O controle sem passo na velocidade dos motores de indução não pode ser realizado com a mesma eficácia e a baixo custo que os motores CC. Vários métodos de controle do mecanismo de indução podem ser vistos considerando a equação de velocidade
![]()
Vemos nesta equação que existem dois métodos básicos de controle de velocidade do motor de indução, ou seja,
- Controle o deslizamento para uma velocidade síncrona fixa e
- Controle de velocidade síncrona.
De

Existem duas maneiras de controlar a velocidade síncrona – controle da frequência de oferta e controle de postes do estator. Este último método fornece um controle de etapas porque os pólos podem ser modificados em vários dos dois. A mudança de postagem é realizada apenas em um mecanismo de gaiola de esquilo e também para duas etapas.
Controle de tensão:
É um método de controle deslizante com uma tensão de frequência constante variável fornecida ao estator do motor. Obviamente, a tensão deve ser reduzida apenas sob o valor nominal.
Para um motor operando em um deslocamento de carga total, se o deslocamento deve ser dobrado para um torque de carga constante, ele se segue das equações (9.34) e (9.35) que a tensão deve ser reduzida por um fator de 1 / √2 e que a corrente correspondente (i’2) aumenta para √2 do valor total da carga.
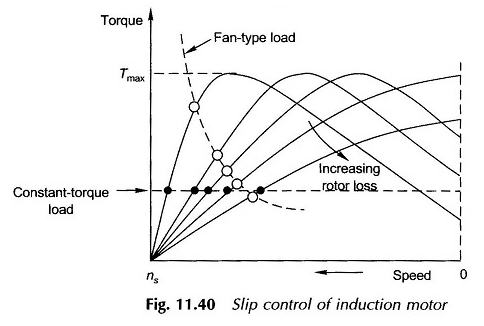
O motor, portanto, tende a superaquecer. O método não é, portanto, adequado para controle de velocidade. Possui um uso limitado para os motores, resultando em cargas do tipo ventilador cujas necessidades de torque são proporcionais à velocidade da velocidade (ver Fig. 11.40).
Este é um método comumente usado para ventiladores de teto treinados por motores de indução sem fase que têm uma grande impedância de parada, limitando a corrente desenhada pelo estator.
Controle de resistência ao rotor:
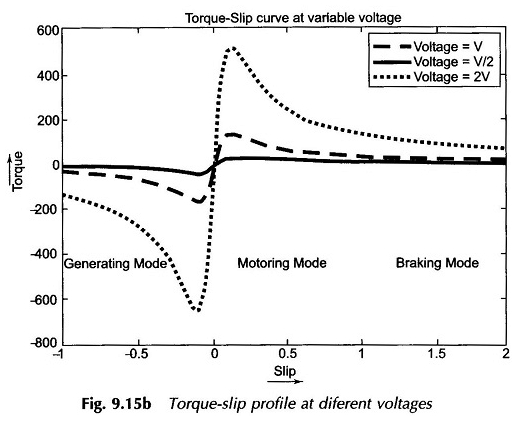
Como o próprio nome sugere, esse tipo de controle de velocidade só é possível para os motores de indução de anel. É facilmente visto referindo -se à Figura 9.15 que, quando a resistência ao rotor aumenta, a mudança do motor aumenta (queda de velocidade) para um torque de carga fixa.
A corrente do estator varia em uma extensão limitada porque o efeito das alterações da resistência ao deslizamento e do rotor tende a cancelar (referindo -se à equação (9.34)) para pequenos valores deslizantes. O poder de entrada aumenta, no entanto. Isso prevê a energia perdida em resistência adicional ao rotor.
A eficiência do mecanismo operacional, é claro, diminui acentuadamente. Portanto, esse método de controle de velocidade é adotado para uma faixa de velocidade estreita e geralmente para uma operação de curto prazo.

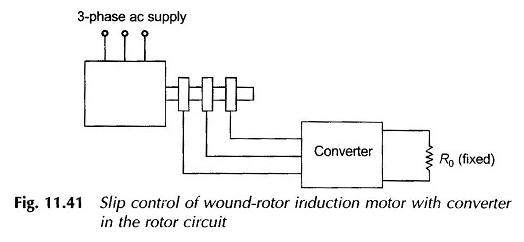
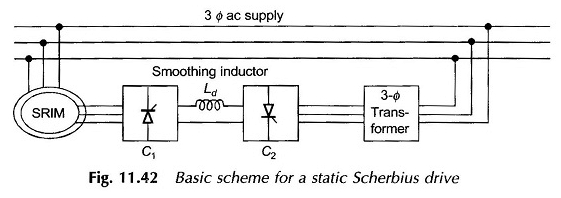
A eficácia desse tipo de diagrama de controle de velocidade pode ser melhorada retornando a potência do rotor mecanicamente à árvore do rotor ou eletricamente ao setor. O primeiro diagrama pode ser implementado por um retificador e um motor de corrente contínua juntamente com a árvore do rotor.
O segundo diagrama requer um conversor de frequência que converte a potência de frequência variável em uma frequência fixa (fonte de alimentação) para reduzir a energia elétrica para o setor. Esses padrões podem ser projetados pelos circuitos SCR (ver Figuras 11.41 e 11.42).
É possível atingir velocidades supersíncronas injetando energia na frequência apropriada no rotor por meio de uma fonte de frequência ajustável.
Podemos ver que é exatamente o oposto adicionar uma resistência ao rotor no qual a potência é retirada do rotor (e desperdiçada em uma resistência externa).
Uma ampla gama de controle de velocidade acima e abaixo é síncrona, incluindo o equipamento de conversão de frequência no circuito do rotor.
Controle de frequência:
A velocidade do motor de indução síncrona pode ser controlada em uma etapa sem uma ampla faixa modificando a frequência de oferta. De acordo com a equação. (9.1) O homem aéreo que flui resultante por polo é dado por


Consequentemente, para evitar a saturação dos núcleos do estator e do rotor, o que causaria um alto aumento na corrente de magnetização, o fluxo φR deve ser mantido constante porque F é variado. Para conseguir isso, segue -se da equação.
(9.81) que, quando F é variado, V também deve variar de tal maneira que (v / f) permanece constante. A fonte de alimentação variável (v, f) da potência constante (v, f) pode ser organizada pelo layout da palestra do conversor ilustrada esquematicamente na Figura 9.49 (a) que usa circuitos SCR. A Figura 9.49 (b) mostra um esquema alternativo de controle de velocidade usando um conversor e um motor CC (shunt).

A principal atração do uso do mecanismo de indução para controle de velocidade é sua robustez, seu baixo custo e sua manutenção sem manutenção em comparação com o motor CC.
Devido ao custo do inversor envolvido no esquema de controle de velocidade do motor de indução, o diagrama de motor de corrente contínuo é mais econômico.
No entanto, o esquema do motor de indução é um sólido candidato ao controle de velocidade e deve assumir o cargo em um futuro próximo com uma melhoria e redução na tecnologia adicional de CCR.