Controle de velocidade do motor de indução trifase:
O problema de controlar a velocidade do motor de indução de três fases em particular é de grande importância prática.
Em várias indústrias, os motores devem atender aos requisitos característicos muito rígidos, tanto em relação ao alcance quanto à doçura do controle e também no que diz respeito ao funcionamento econômico.
Do ponto de vista da visão da velocidade das características do mecanismo de indução das três fases, os motores de indução são inferiores aos motores CC.
A velocidade de um motor CC de derivação pode ser ajustada entre uma ampla faixa com boa eficiência e boa regulação de velocidade, mas nos motores de indução, a velocidade não pode ser variada sem perder a eficiência e a boa regulação da velocidade.
A velocidade de um motor de indução é dada pela expressão

Assim, existem três fatores, a saber, a frequência de potência f F, o número de PLE Pôles P e o slissement S, nos quais a velocidade de um motor de indução depende. Portanto, para alterar a velocidade de um mecanismo de indução, é essencial modificar pelo menos um dos três fatores acima.
Os métodos de controle de velocidade do motor de indução de três fases são distinguidos, dependendo da ação principal do motor: (i) no lado do estator e (ii) na lateral do rotor.
Vários métodos de controle da velocidade do mecanismo de indução de três fases no lado do estator são (a) a variação na frequência da oferta (b) a variação da tensão aplicada e (c) modificando o número de pólos.
Na lateral do rotor, a velocidade pode ser controlada (a) modificando a resistência no circuito do rotor e (b) introduzindo no circuito do rotor um EMF adicional da mesma frequência que a fem fundamental do rotor.
Para este método de controle do motor de indução de três fases mais recente, é necessária uma máquina elétrica adicional ou mais dessas máquinas.
Um conjunto composto por um motor de indução regulamentado e uma ou mais máquinas elétricas adicionais conectadas a ele eletricamente ou mecanicamente são chamadas de cascata. As máquinas de comutação são comumente usadas como máquinas adicionais.
1. Controle de velocidade por variação na frequência de oferta
Esse método de controle do motor de indução de três fases fornece uma ampla faixa de controle de velocidade com uma variação progressiva na velocidade em toda a praia. A principal dificuldade com esse método é como obter a dieta em frequência variável.
O equipamento auxiliar necessário para esse fim leva a um alto custo, maior manutenção e uma queda na eficiência geral. É por isso que esse método não é usado para aplicações de controle de velocidade para uso geral.
Apesar de esse diagrama ser complicado, existem certas aplicações nas quais sua ampla faixa de velocidade e boa regulamentação de velocidade tornam permanentemente muito desejável.
Se um mecanismo de indução deve operar em diferentes frequências com valores praticamente constantes de eficiência, fator de potência, capacidade de sobrecarga e uma mudança absoluta constante; então, com ferro insaturado, é essencial que a tensão de alimentação varia em proporção à frequência da fonte de alimentação.
Esse tipo de variação pode ocorrer, por exemplo, se o gerador de energia estiver sujeito a variações de velocidade, devido a sobrecargas momentâneas ou devido à regulação significativa da velocidade. A tensão e a frequência de saída variam tanto como uma velocidade se nenhuma correção automática for fornecida.
Em certos grandes treinamentos marítimos, os motores da hélice são do tipo de indução e são controlados em velocidade a partir de uma fonte de alimentação local que é fornecida por geradores síncronos acoplados a turbinas em velocidade variável.
Mesmo nesses casos, a faixa de variação de velocidade é limitada, porque a eficácia dos principais motores cai rapidamente com a mudança de velocidade em comparação com o que eles foram projetados.
As curvas de velocidade típicas para quatro frequências diferentes são representadas na Figura 1.25.

2. Controle de velocidade por variação na tensão de alimentação
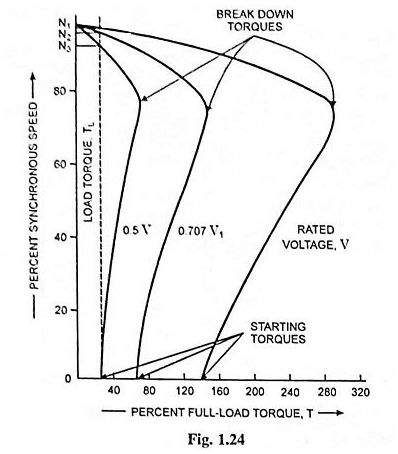
É um método de controle deslizante com uma tensão de alimentação de frequência constante variável. Neste método de controlar a velocidade dos motores de indução, a tensão aplicada ao estator varia para variar a velocidade.
This Method of Speed Control of Three Phase Induction Motor is Simple, Low in First Cost and has long maintenance cost it has limited use because the operation at Voltages exceeding rated voltage is restricted by magnetic saturation, (ii) a large change in voltage (III) The Developed Torque Reduces Greatly With The Reduction in Supply Voltage and the Motor Come To Standstill If the Load Torque Exceds The Pull-Out The engine torque corresponding to a reduced power tension and (Iv) A faixa de controle de velocidade é muito limitada na direção para baixo, ou seja, a velocidade nominal nas velocidades mais baixas.
Em geral, esse método de controle do motor de indução de três fases é usado apenas em cargas onde o torque necessário cai consideravelmente à medida que a velocidade é reduzida, como nos pequenos motores da gaiola de esquilo que lidera os ventiladores.
A tensão variável pode ser obtida por meio de reatores saturados, variacs ou transformadores com uma mudança de mudança.
As características da aceleração com tensões reduzidas são ilustradas na Figura 1.24.
3. Controle de velocidade modificando o número de pólos
Este método é facilmente aplicável a motores de gaiola de esquilo porque um enrolamento de gaiola reage automaticamente para criar o mesmo número de pólos que o estator.
Esse método de controle do motor de indução de três fases geralmente não é possível com os motores radiculares das feridas, como nessas máquinas, esse método envolveria complicações consideráveis de design e comutação, porque as interconexões de primário e secundário devem ser modificadas simultaneamente para produzir o mesmo número de pólos nos dois enrolamentos. Caso contrário, um casal negativo será desenvolvido por algumas das correias do motorista do rotor.
O número de pares de pólos no estator pode ser modificado da seguinte forma:
(a) Usando vários enrolamentos do estator: neste método de controle do motor de indução de três fases, dois ou mais enrolamentos independentes, cada lesão para um número diferente de pólos, são colocados nas mesmas máquinas caça -níqueis. O número de postes de enrolamento do estator está neste
Em nenhum caso vinculado interdependentemente e não pode ser escolhido arbitrariamente de acordo com as condições operacionais deste mecanismo.
Por exemplo, um motor de duas velocidades pode ter dois enrolamentos do estator, uma lesão para 4 postes e outro para 6 polos que fornecerão velocidades síncronas de 1.500 rpm e 1000 rpm com uma frequência de potência de 50 Hz.
Os motores com quatro enrolamentos independentes do estator também são usados às vezes e fornecem quatro velocidades síncronas (e, portanto, funcionando). Obviamente, um enrolamento é usado ao mesmo tempo, sendo os outros totalmente ineficazes.
A mudança de uma velocidade para outra pode ser realizada por um interruptor mecânico ou pelos contatores. Com esse arranjo, enrolamento ou enrolamentos que são / não são usados devem ser mantidos abertos pelo interruptor, ou pelo menos deixados em uma estrela.
Caso contrário, devido à ação do transformador, o enrolamento conectado aos alimentos induzia tensões no enrolamento inativo e causaria superaquecimento devido às seguintes correntes circulantes.
O regulamento em si é equivalente à modificação da velocidade do motor nas etapas, porque um ou outro enrolamento do estator está conectado ao setor de energia.
A cada alteração, o motor está em condições essencialmente semelhantes às condições de partida, ou seja, uma corrente significativa e um torque reduzido. Devido a drivers inativos, esse método de mudança de postagem requer um grande estator que um motor a uma única velocidade da mesma nota.
Esse método foi usado para motores de elevador, mecanismos de tração e também para motores pequenos para dirigir máquinas -ferramentas.
(b) Método substancial do pólo: o método de mudança de pólo para o controle da velocidade do mecanismo de indução trifásica descrito acima no (a) ou seja, o método de enrolamento do estator múltiplo, é usado apenas em pequenos motores.
Em motores grandes, é mais apropriado usar uma técnica substancial de pólo que elimina a necessidade de ter vários enrolamentos para modificar o número de centros de estator.
Esse método de controle do motor de indução de três fases usa todo o enrolamento para cada velocidade. Normalmente, para um único motor de velocidade, os sucessivos grupos de bobinas são enrolados para criar centros de polaridade sucessivamente opostos. Isso é ilustrado na Figura 1.83, onde é desenvolvida uma fase de um enrolamento de quatro pupos.
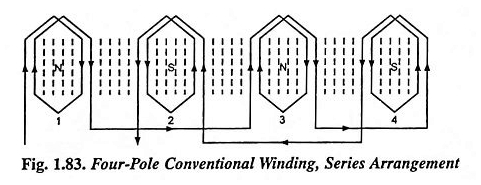
Deve -se notar que todas as bobinas estão em série, mas que as conexões finais são estabelecidas para grupos alternativos, ou seja, o Grupo 1 do Grupo 3 e o Grupo 4 do Grupo 2.
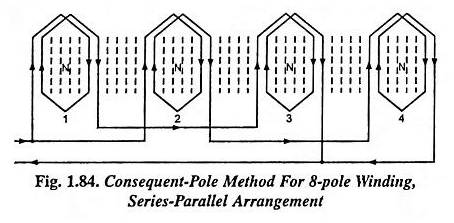
Agora, as conexões finais dos grupos, com as mesmas bobinas, podem ser modificadas de modo a ter bobinas sucessivas da mesma polaridade, como ilustrado na Figura 1.84.
Paralelamente às conexões em série dos grupos 2-4 com esses grupos 1-3, a polaridade dos grupos 2 e 4 mudou, de modo que agora existem quatro pólos do norte sucessivos.
Como resultado desses pólos do sul, são criados entre cada um dos pólos do norte, e o motor agora tem um enrolamento de 8 póis.
Assim, para uma fonte de alimentação de 50 Hz, o arranjo da série fornece uma velocidade síncrona de 1.500 rpm, enquanto o arranjo da série parral fornece uma velocidade síncrona de 750 rpm.
Também é possível usar um arranjo paralelo serial para enrolamento de 4 póis e depois mover -se na série para enrolamento de 8 póis. Um circuito para alterar um enrolamento de três fases do enrolamento de 2 a 4 postagem é ilustrado na Figura 1.85.
Ao reconectar todos os grupos de bobinas para a mesma polaridade, o estator age como se tivesse duas vezes mais pólos que os grupos de pólos. Os pólos adicionais assim criados são chamados de pólos substanciais, e o enrolamento é conhecido como um pós -enrolamento consecutivo.
Por um único arranjo de comutação, é possível ter a conexão padrão (ou convencional) de um lado de um interruptor de lançamento duplo e a conexão da postagem substancial do outro lado do interruptor.
Assim, duas velocidades podem ser obtidas, velocidade mais alta com conexão convencional e meio impressa com uma conexão substancial por pólo.

Nos motores usando a técnica substancial do pólo para controle de velocidade, o melhor design possível geralmente não é obtido em ambas as velocidades.
Em outras palavras, as características desejáveis, como o fator de alta potência, são sacrificadas a uma velocidade, de modo que um fator de poder razoavelmente bom seja obtido na outra velocidade.
Às vezes, as conexões do estator passaram de Delta para estrela ao mesmo tempo que as conexões postais são modificadas. Isso altera a tensão e torna um motor melhor possível a cada velocidade.
Dois motores de velocidade geralmente são fabricados com um enrolamento no estator, o número de pólos sendo modificado na proporção 1: 2. Os motores de três e quatro velocidades recebem dois enrolamentos nas estatísticas, uma ou ambas são fabricadas modificando o número de pólos.
Por exemplo, se desejar obter um motor por quatro velocidades síncronas; 1500, 1.000, 750 e 500 rpm, dois enrolamentos devem ser colocados no estator, um dos quais dando 4 e 8 postes e o outro dando 6 e 12 postes.
Usando uma conexão paralela em série de grupos de fase individuais, as fases podem ser conectadas na estrela / delta, o que leva a uma operação de duas velocidades com os três tipos de características de velocidade de torque, ou seja, torque constante, potência constante e torque variável.
Devido a complicações no projeto e troca do enrolamento do estator, não é possível obter mais de quatro velocidades para qualquer motor, graças a esse método de controle de velocidade. Este método também não fornece controle de velocidade progressiva.
É por isso que esse método não é usado para aplicações de controle de velocidade para uso geral.
No entanto, esse método é muito satisfatório para aplicações, como ventiladores, transportadores, máquinas -ferramentas ou outros aplicativos que requerem apenas duas ou quatro operação aproximadamente constante que ela fornecerá.
Esse método tem a vantagem da simplicidade, regulação de boa velocidade para cada ajuste, alta eficiência e custo e manutenção iniciais moderados.
O número de pares de pólos no estator também pode ser modificado usando a técnica de modulação da amplitude dos pólos – uma técnica de modulação dos suportes do pórtic.
Esse método de mudança de postagem tem a vantagem de que a proporção das duas velocidades disponíveis não deve necessariamente ser de 2: 1, como no método substancial do pólo.
4. Controle de impedância do estator
Uma tensão reduzida nos terminais da máquina pode ser obtida inserindo resistência ou indutâncias equilibradas em série com cada fio do estator. Sob tais condições, a tensão do terminal do motor se torna dependente da corrente do motor e a tensão muda com a aceleração do motor. As características de torque em velocidade típica são ilustradas na Figura 1.86.
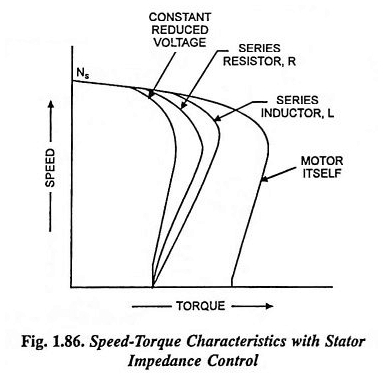
Se a impedância (R ou X) for ajustada para fornecer o mesmo torque de partida, a característica da velocidade do filhote no caso de uma adição de indutância teria um torque maior do que com resistência adicional.
Além disso, essas duas características nos permitem ter casais maiores do que os obtidos com a característica com uma tensão aplicada reduzida, para o mesmo torque de partida.
A inserção da resistência no circuito do estator melhora o fator de potência, mas ao preço de maiores perdas de energia.
5. Controle de velocidade por variação na resistência ao rotor (ou controle de resistência ao rotor)
Os motores radiculares das feridas são geralmente lançados pela conexão das resistências de partida no circuito secundário, que são curtos-circuitadas nos palcos à medida que o motor acelera.
Se os valores ôhmicos desses resistores forem escolhidos adequadamente e se esses resistores forem projetados para operação contínua, poderão ser usados para obter uma meta dupla, para iniciar e controlar a velocidade. Também óbvio, esse método pode ser aplicado apenas aos motores do rotor enrolados.
A suavidade do controle de velocidade depende do número de estágios dos resistores disponíveis. O controle é fornecido na direção da velocidade básica. A faixa de controle de velocidade não é constante e depende do valor da carga.
Esse método de controle de velocidade possui características semelhantes às da velocidade do motor DC de derivação por meio de resistência em série com o quadro. Suas principais desvantagens são menor eficiência e regulação de baixa velocidade devido ao aumento da resistência ao rotor a configurações de baixa velocidade.
Por exemplo, a 50% da velocidade síncrona, a eficácia do rotor é de apenas 50% e a eficiência do motor seria um pouco menor. A variação de velocidade é limitada a um intervalo de 50 a 100%.
Os reostatos líquidos são preferidos aos reostatos metálicos porque não têm indutância e os resistores podem ser delicadamente cortados, dando um torque uniforme.
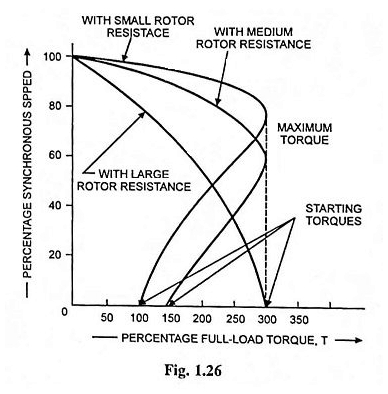
A introdução de resistências externas no circuito do rotor de um motor de indução com anel deslizante modificará as características do plotagem de velocidade, conforme ilustrado na Figura 1.26.
Esse método de controle do motor de indução de três fases, portanto, não é adequado para controlar a velocidade para um torque constante.
Mas esse método é amplamente utilizado para cargas, onde o casal exigido cai consideravelmente à medida que a velocidade é reduzida, como cargas de ventilador para as quais a entrada de alimentação cai significativamente quando a velocidade é reduzida, o que reduz as perdas de cobre do rotor.
Além disso, esse método não é adotado para controle de velocidade contínuo, mas é preferido para operação intermitente (curto tempo). Esse método de controle de velocidade é amplamente utilizado na prática, para motores de baixa potência e em guindastes aéreos.
Às vezes, é usado, no entanto, para a regulação da velocidade dos rolos, em particular onde eles são fornecidos com babados para reduzir os picos de carregamento no circuito.
Aqui, o reostato, chamado de controle de cruzeiro, está automaticamente ligado quando a carga aumenta e, portanto, a velocidade diminui e parte da carga é deslocada em detrimento da energia cinética do volante.
Por outro lado, quando a carga diminui, a resistência ao circuito do rotor é reduzida; A velocidade aumenta e o volante começa a armazenar energia cinética.
6. Controle secundário de tensão estrangeira
Neste método, a velocidade de um mecanismo de indução é controlada pela injeção de uma tensão de frequência deslizante no circuito secundário.
Se a tensão injetada estiver alinhada com o EMF induz no circuito secundário, é equivalente a uma diminuição da resistência no circuito secundário; portanto, a mudança diminui ou a velocidade aumenta.
É possível atingir velocidades super síncronas injetando uma tensão de frequência deslizante em fase com o CMF induzido no circuito do rotor.
Se a tensão injetada estiver na fase de oposição à EMF induz no circuito secundário, é equivalente a aumentar a resistência no circuito secundário, resultando em um aumento no deslizamento ou em uma redução na velocidade.
Assim, uma ampla gama de controle de velocidade é possível por esse método, incluindo equipamentos de conversão de frequência no circuito do rotor.
Nesse método, as desvantagens de menor eficiência e regulação de baixa velocidade são superadas, mas requer uma e geralmente mais máquinas auxiliares para injetar uma EMF de frequência deslizante no circuito secundário; portanto, é mais caro e usado com motores de nota muito grandes, como para motores em moinhos de aço.
Vários métodos foram desenvolvidos para controlar a velocidade dos motores de indução, injetando uma tensão de frequência deslizante no circuito secundário.
Os diferentes métodos variam em seus requisitos para equipamentos auxiliares; A partir da incorporação do equipamento auxiliar no projeto do próprio mecanismo de indução a um sistema bastante complicado de máquinas rotativas auxiliares e transformadores de proporção ajustável.
O critério básico que esse sistema deve preencher é: (i) que a tensão estrangeira variável tem uma frequência deslizante, ou seja, uma frequência igual a SF e (ii) que a energia associada à tensão estranha é recuperável.
Os sistemas mais comuns baseados nesse princípio são o sistema Kramer, o sistema LEBLANC e o controle de velocidade de Scherbius de motores de indução de polifásicos.
7. Controle de velocidade por concatenação
Neste método, dois motores são necessários, dos quais pelo menos se deve ter um rotor de feridas. Os dois motores podem ser acoplados mecanicamente para causar uma carga comum.
Se o enrolamento do estator de um deles, um motor de rotor de feridas, for conectado à fonte de alimentação CA de três fases e seu enrolamento do rotor estiver conectado ao enrolamento do segundo estator do motor, a velocidade da combinação será determinada pela soma ou a diferença no número de pólos nas duas máquinas.
Na prática, é comum conectar a saída do rotor da primeira máquina ao estator da segunda máquina de forma que os campos de viragem dos dois estejam na mesma direção; Nesta condição, a velocidade resultante será determinada pela seguinte expressão.

Ou
- F é a frequência alimentar,
- P1 e P2 são o número de pólos nas máquinas I e II, respectivamente.
Para obter uma velocidade, acima do normal, o torque do segundo motor é revertido simplesmente modificando dois dos fios do segundo motor. Isso é chamado de cachoeira diferencial e, sob essa condição, será dada pela expressão.

Um controle de velocidade adicional, se desejar, pode ser obtido com uma segunda máquina do tipo máquina e inserindo a resistência ao controle no circuito do rotor da segunda máquina.

Se os dois motores tiverem o mesmo número de pólos e estiverem conectados em cascata cumulativa [Eq. (1.77)], eles operarão metade da metade. Como o torque da árvore é amplamente reduzido em cascata diferencial, ela não é usada na prática.
A saída mecânica das duas máquinas está aproximadamente no relatório de

ou P1: P2, ou seja, na proporção do número de pólos nas máquinas.