Princípio operacional do motor de indução:
O princípio operacional do mecanismo de indução na Figura 9.4 mostra a visão transversal -seccional de um mecanismo de indução. O estator é alimentado a partir de uma fonte de alimentação de tensão V / de fase trifásica e frequência F Hz. O rotor é enrolado em 3 fases para tantos pólos que o estator e é curto-circuito. Supõe -se que a resistência do estator e a reatância dos vazamentos sejam insignificantes para
![]()
Ou
- E1 = EMF induzido pelo estator / fase
- KW1 = fator de enrolamento do estator
- NPH1 (série) = STATOR Tourne / Fase Series
- Φr = pólo de fluxo / ar resultante
É visto na equação. (9.1) que, independentemente das condições de carga existentes no rotor, φR, o fluxo / pólo estabelecido na caminhada de ar é constante, ligado à tensão aplicada à hipótese feita.
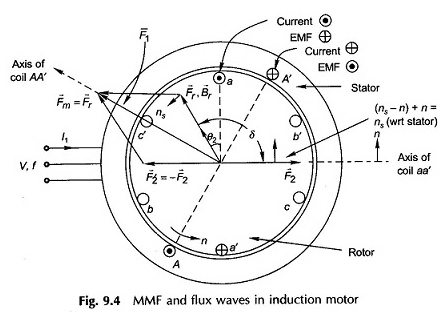
O vetor MMF F̅R com o vetor de densidade de fluxo associado B̅R, responsável pela produção de φR, em uma velocidade síncrona porque está associada a 3 correntes de três fases equilibradas desenhadas pelo estator.
A velocidade relativa entre B̅R e o rotor causa a indução de um padrão de corrente no rotor curto-circuito.
O torque produzido pela interação de B̅R e as correntes do rotor pela lei de Lenz tenderiam a mover o rotor na direção da rotação de B̅R para reduzir a velocidade relativa.
O motor é, portanto, auto-sombrio e o rotor adquire uma velocidade constante n
A Figura 9.4 mostra a localização relativa dos vetores F̅r, B̅R (MMF de gap de ar e densidade de fluxo), F̅2 (Rotor MMF), no qual F̅r leva F̅2 pelo ângulo Δ = 90 ° + θ2 (ação de automóvel), θ2 é o ângulo sob o qual o rotor emf.
O ângulo θ2 é, no entanto, muito pequeno porque a reatância do rotor é muito menor que a resistência ao rotor. O vetor de estator MMF é então dado por
![]()
está localizado no diagrama vetorial. Enquanto o diagrama for desenhado, o estator e a fase do rotor A (representados na forma de uma única bobina) são o máximo possível. O leitor pode verificar a localização dos vetores da fase A atual, aplicando a regra certa.
Deslizamento e frequência das correntes do rotor:
Em referência à Figura 9.4, observa -se facilmente que o B̅R se move em velocidade (NS – N) em relação aos drivers de rotor (na direção do B̅R). Isso é conhecido como velocidade deslizante. Mudança é definida como

Obviamente, s = 1 para n = 0, ou seja, para o rotor estacionário e s = 0 para n = ns, ou seja, para o rotor operando a uma velocidade síncrona.
A frequência de correntes induzidas no rotor é
O grito normal com carga completa do princípio operacional do mecanismo de indução é de 2% a 8%, de modo que a frequência das correntes do rotor é tão baixa quanto de 1 a 4 Hz.
O rotor por fase EMF em s = 1 (rotor de mudança) é dado por
![]()
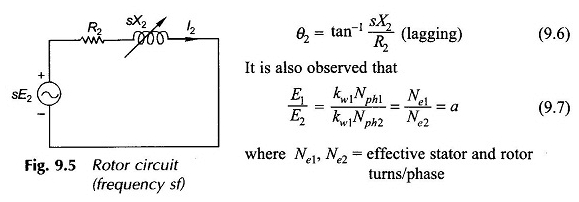
Em qualquer turno, sendo a frequência do rotor SF, o EMF induz pelo rotor é transformado em SE2. Agora considere a impedância do circuito do rotor
![]()
Ou
- X2 = reatância do rotor do rotor quando parado (frequência do rotor = frequência do estator, f)
Quando o rotor opera no Slip S, sua frequência sendo SF, sua impedância é transformada em
![]()
Portanto, verificou -se que a frequência das correntes do rotor, seu FEM induzido e sua reatância variam em proporção direta à mudança. A Figura 9.5 mostra o circuito do rotor com deslizamento s. O ângulo da fase do circuito é
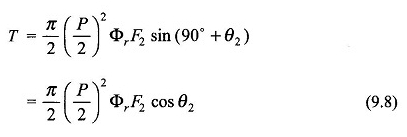
Produção de MMF e torque do rotor:
Na Figura 9.4, como o vetor da densidade de fluxo resultante de B̅R funciona em velocidade (NS – N) em relação ao rotor, um EMF positivo máximo é induzido na bobina do rotor AA ‘(indicado por ponto no driver A e cruzamento no motorista a’) quando B̅r está a 90 ° em frente ao declínio.
Como a corrente no rotor está atrasada atrás da EMF de θ2, a corrente na bobina AA ‘será máxima positiva quando o B̅R avançar ainda mais pelo ângulo θ2. É neste momento que o vetor MMF do rotor F̅2 estará ao longo do eixo da bobina AA ‘.
Observa -se, portanto, que B̅r (ou f̅r) está em um ângulo Δ = (90 + θ2) antes de f̅2. Além disso, F̅2 causado pelas correntes do rotor de frequência f2 = SF é executado em comparação com o driver do rotor em velocidade (NS – N) e na velocidade NS.
Em relação ao estator, porque o próprio rotor se move na mesma direção na velocidade n em comparação com o estator.
Assim, F̅r e F̅2 se movem a uma velocidade síncrona em comparação ao estator e são estacionários em relação aos outros com F̅R localizado na frente de F̅2 por ângulo (90 ° + θ2).
A interação do campo do rotor e o campo resultante cria um casal na direção de rotação do F̅R.
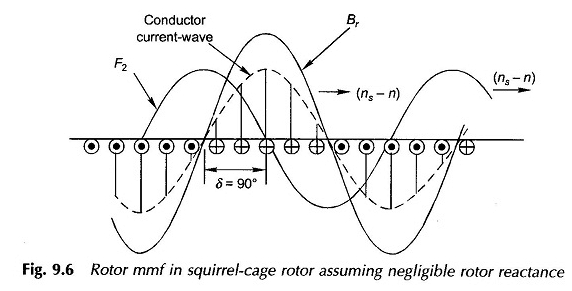
Agora considere o caso do rotor do esquilo com os motoristas espalhados uniformemente ao redor da periferia do rotor. A reação do rotor MMF F2 é melhor visualizada a partir do diagrama desenvolvido da FIG.
9.6 em que o rotor é imaginado como estacionário e a onda marrom – movendo -se em comparação com ele na velocidade de deslizamento (NS – N). Que a reatância do rotor é considerada insignificante para que as correntes do motorista (curto-circuito) estejam alinhadas com o driver da EMF.
O padrão atual do motorista é, portanto, dissipado sendoidalmente e está na fase espacial com breve e se move de maneira síncrona. A onda MMF do rotor é um sinusoidal armazenado com o mesmo número de pólos que o movimento da onda bruta com ele.
Seu fundamental (F2) representou na Figura 9.6 Leis do BR alegam 90 °. Se a reatância do rotor agora estiver encenada, a onda atual do motorista e, portanto, a onda MMF do rotor estaria atrasada pelo ângulo θ2.
Assim, o ângulo entre o BR e a onda F2 seria (90 ° + θ2), o mesmo que no rotor da ferida.
Um rotor de gaiola de esquilo, portanto, reage da mesma maneira que um rotor de ferida, exceto que o número de fases não é óbvio – pode ser considerado como tendo tantas fases quanto as barras / pólos. Um rotor da gaiola de esquilo sempre pode ser substituído por um rotor de ferida equivalente com três fases.
É visto na equação. (9.8) do que um rotor de reação baixa (θ2 fraco = tan-1 jsx2 / r2) gerará um casal maior para φR, F2 e S dados.
Um motor de esquilo da gaiola é maior nesse sentido em comparação com um motor do rotor da ferida, porque o rotor da gaiola tem uma reatância mais baixa porque não tem uma saliência de enrolamento.
Uma observação muito importante que pode ser feita em princípio para operar o mecanismo de indução aqui é que, embora as correntes do rotor tenham uma frequência SF, o MMF (F2) causado por eles funciona a uma velocidade síncrona em comparação com o estator.
Em outras palavras, a reação das correntes do rotor corresponde às correntes de frequência (f) do estator que fluem em uma estrutura cilíndrica estacionária equivalente a dentro do estator em vez do rotor.
Ou, para colocar de outra maneira, as visualizações das correntes do rotor do estator têm a frequência f, mas têm o mesmo valor RMS.
O vetor MMF Stator F̅1 está localizado na Figura 9.4 da equação do vetor
![]()
Além disso, F̅1 pode ser dividido em componentes como
![]()
onde f̅2 está em oposição a f̅2 e igual à magnitude e
![]()
A corrente do estator que causa F̅1 pode, correspondendo ao vetor de eq. (9.10), seja dividido em componentes
![]()
Aqui, o I̅M pode ser reconhecido como uma corrente de magnetização do arquivo que causa o MMF FR resultante e o fluxo / pólo resultante, φR, enquanto o componente da corrente do estator que equilibra a reação F2 da corrente do rotor I2.
A Figura 9.4 também mostra a localização relativa da bobina do estator AA e a direção positiva da corrente. Esta imagem vetorial instantânea é mantida quando I2 tem um valor positivo máximo.
Para F’2 cancelar F2, o componente de corrente do estator que equilibra o rotor MMF deve estar alinhado com a corrente do rotor, como mostrado no estator.

Em termos de amplitudes, o F’2 é direcionado oposto ao F2, para que eles cancelem enquanto I’2 e I2 devem obedecer à proporcionalidade da equação. (9.13) e deve estar em fase.
Além disso, por referência à Figura 9.4, podemos ver facilmente que, no estator, a direção positiva do EMF E1 se opõe à direção positiva de I1, enquanto no rotor, a direção positiva de I2 está na direção positiva de SE2. Isso é semelhante ao caso do transformador.
Com a direção de uma corrente positiva na bobina do estator AA marcada como na Figura 9.4 e a direção do eixo do colóquio indicou, a lei de indução que dará uma EMF positiva em oposição à corrente é

Esse princípio operacional do mecanismo de indução tem o mesmo sinal usado no alojamento do transformador, de modo que a fase de fluxo φR e a corrente de magnetização que o criem tardio E1 de 90 °. No modelo de circuito, o IM seria, portanto, desenhado pela reatância de magnetização XM através de E1.