Schéma de récupération de puissance de glissement utilisé dans le moteur à induction:
Schéma de récupération de puissance de glissement utilisé dans le moteur à induction – La figure 6.53 montre un circuit équivalent d’un moteur d’induction du rotor de plaie avec une VR de tension injectée dans son rotor, en supposant que le rapport stator-rotor unité des virages. Lorsque la perte de cuivre du rotor est négligée
![]()
où PR est la puissance absorbée par la source VR. L’amplitude et le signe de PR peuvent être contrôlés en contrôlant l’ampleur et la phase de VR. Lorsque PR est nul, le moteur fonctionne sur sa caractéristique de couple de vitesse naturelle.
Un PR positif réduira les PM et, par conséquent, le moteur fonctionnera à une vitesse inférieure pour le même couple. Lorsque PR est fait égal à PG, PM et, par conséquent, la vitesse sera nulle. Ainsi, la variation de PR de 0 à PG permettra le contrôle de la vitesse du synchrone à la vitesse zéro. La polarité de la VR pour cette opération est représentée sur la figure 6.53 par une ligne continue.
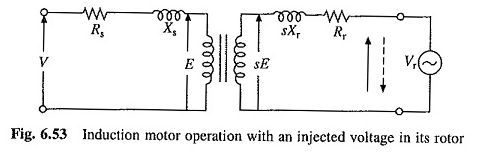
Lorsque PR est négatif, IE VR agit comme une source de puissance, PM sera plus grand que PG et le moteur fonctionnera à une vitesse supérieure à la vitesse synchrone. La polarité de la VR pour le contrôle de la vitesse au-dessus de la vitesse synchrone est représentée par une ligne pointillée sur la figure 6.53.
Lorsque la perte de cuivre du rotor est négligée, PR est égal au schéma de récupération de puissance de glissement utilisé dans le moteur à induction, SPG. Le contrôle de vitesse en dessous de la vitesse synchrone est obtenu en contrôlant la puissance de glissement. La même approche a été adoptée dans le contrôle de la résistance au rotor.
Cependant, au lieu de gaspiller le pouvoir dans des résistances externes, il est utilement utilisé ici. Par conséquent, ces méthodes de contrôle de la vitesse sont classées comme schéma de récupération de puissance de glissement utilisée dans les schémas de récupération du moteur d’induction. Deux de ces schémas, le sherbius statique et les entraînements statiques de Kramer sont décrits ici.
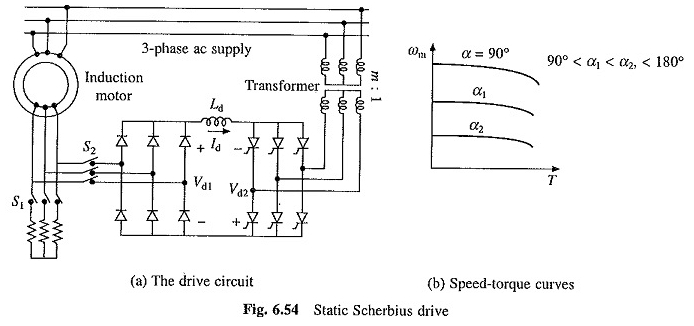
Drive de Scherbius statique (Fig. 6.54 (a)):
Il fournit le contrôle de vitesse d’un moteur de rotor de plaie sous la vitesse synchrone. Une partie de la puissance AC du rotor est convertie en CC par un pont à diode. Le redresseur contrôlé fonctionnant comme un onduleur le convertit en AC et le renvoie à la source AC. Power a été renvoyé (c’est-à-dire
Pr) peut être contrôlé en contrôlant le compteur de l’onduleur EMF VD2, qui à son tour est contrôleur en contrôlant l’angle de tir de l’onduleur. L’inductance de liaison CC est fournie pour réduire l’ondulation dans l’ID actuel de liaison CC.
Étant donné que le schéma de récupération de la puissance de glissement utilisé dans le moteur à induction est remis à la source, contrairement au contrôle de la résistance au rotor où il est gaspillé dans les résistances, la conduite a une efficacité élevée.
Le lecteur a une efficacité plus élevée que le contrôle de tension du stator par les contrôleurs de tension AC pour les mêmes raisons.
L’alimentation d’entrée du conduite est la différence entre la puissance d’entrée du moteur et la puissance renvoyée. La puissance d’entrée réactive est la somme des pouvoirs réactifs du moteur et de l’onduleur. Par conséquent, le disque a un mauvais facteur de puissance tout au long de la plage de son fonctionnement.
De la figure 6.54 (a), négligeant le stator et les gouttes de rotor

où α est l’angle de tir de l’onduleur et, n et m sont, respectivement, le rapport stator / rotor de virages du rapport moteur et côté de la source à convertisseur des virages côté du transformateur. Négliger la chute à travers l’inducteur
![]()
Substituant des équations. (6.93) et (6.94)

où a = n / m.
La valeur maximale de α est limitée à 165 ° pour une commutation sûre des thyristors de l’onduleur. Le glissement peut être contrôlé de 0 à 0,966A lorsque α est passé de 90 à 165 °. Par choix approprié de A, la plage de vitesse requise peut être obtenue.
Le transformateur est utilisé pour correspondre aux tensions VD1 et VD2. À la vitesse la plus basse requise du lecteur, VD1 aura la valeur maximale Vd1m donnée par
![]()
où SMAX est la valeur du glissement à la vitesse la plus basse. Si α est limité à 165 °, M est choisi de telle sorte que la tension de l’onduleur a une valeur VD1M lorsque α est 165 ° IE

Un tel choix de m assure le fonctionnement de l’onduleur à l’angle de tir le plus élevé à la vitesse du moteur la plus basse, donnant le facteur de puissance le plus élevé (Eqn. (5.109)) et la puissance réactive la plus faible à la vitesse la plus basse.
Cela améliore le facteur de puissance du conduite et réduit la puissance réactive à toutes les vitesses de la plage de vitesse du lecteur.
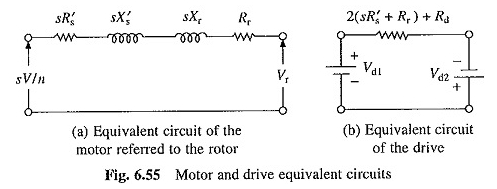
La figure 6.55 (a) montre un circuit de moteur équivalent référé au rotor, négligeant la branche de magnétisation. Dérivation de l’équation. (6.90) montre que lorsqu’elle est référée à la liaison DC, la résistance (SR’s + RR) sera 2 (SR’S + RR). Cela donne un circuit équivalent CC approximatif du lecteur (Fig.
6.55 (b)), où Vd1 et Vd2 sont donnés dans les équations. (6.93) et (6.94). RD est la résistance de l’inductance de liaison DC. Le circuit équivalent ignore le chevauchement de commutation dans le pont de diode. Maintenant

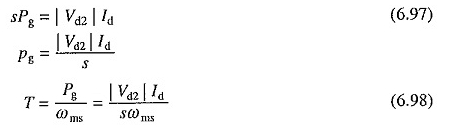
Si la perte de cuivre du rotor est négligée
La nature des courbes de couple de vitesse est représentée sur la figure 6.54 (6).
Le lecteur a des applications dans les disques du ventilateur et de la pompe qui nécessitent un contrôle de vitesse dans une plage étroite uniquement. Si le glissement maximal est indiqué par SMAX, alors les évaluations de puissance du pont de diode, de l’onduleur et du transformateur peuvent être juste SMAX fois la puissance du moteur (Eq. 6.97).
Par exemple, lorsque la vitesse doit être réduite en dessous de la vitesse synchrone de seulement 20%, les évaluations de puissance du pont de diode, de l’onduleur et du transformateur ne seront que de 20% de la puissance du moteur. Par conséquent, Drive a un faible coût.
Le lecteur est démarré par le contrôle de la résistance avec S1 fermé et S2 ouvert (Fig. 6.54). Lorsque la vitesse atteint la plage de commande du lecteur, S2 est fermé pour connecter le pont de diode et l’onduleur est activé. Maintenant, S1 est ouvert pour éliminer les résistances.
Dans les entraînements des ventilateurs et des pompes, le freinage n’est pas nécessaire, car la pression du fluide fournit un couple de freinage adéquat. Pour maintenir un débit de fluide constant avec des variations de la tête de pression et la nature du fluide pompé, le lecteur est utilisé avec un contrôle de vitesse de boucle fermée.
Un schéma de contrôle de la vitesse de boucle à clôture avec le contrôle du courant interne est illustré à la figure 6.56. Il fonctionne de la même manière que le schéma de la figure 3.5.
Ce disque est largement utilisé dans les entraînements de ventilateur et de pompe à puissance moyenne et élevée (jusqu’à environ 10 MW), en raison d’une efficacité élevée et d’un faible coût.
Ce disque fournit un contrôle de couple constant (Eqn. (6.98)). Le contrôle de puissance constant est obtenu par le lecteur Kramer statique décrit ci-dessous.
Drive Kramer statique:
La puissance de glissement du rotor est convertie en CC par un pont de diode (Fig. 6.57 (a)). La puissance CC est désormais transformée en moteur CC couplé mécaniquement au moteur d’induction. Le couple fourni à la charge est une somme de couple produite par les moteurs d’induction et de courant continu. Le contrôle de vitesse est obtenu en contrôlant le courant de champ du moteur à courant continu.

La figure 6.57 (b) montre des variations de VD1 et VD2 avec une vitesse pour deux valeurs de courant de champ moteur à courant continu. L’opération en régime permanent est obtenue lorsque Vd1 = Vd2, IE à A et B pour les courants de champ IF1 et IF2.
Le contrôle de la vitesse est possible de la vitesse synchrone à environ la moitié de la vitesse synchrone. Lorsque une plage de vitesse plus grande est requise, le pont à diode est remplacé par un pont de thyristor.
Maintenant, la relation entre VD1 et la vitesse peut être modifiée en contrôlant l’angle de tir du redresseur du thyristor (voir Fig. 6.57 (c)). La vitesse peut désormais être contrôlée jusqu’à l’arrêt.