Source d’onde carrée de la source de tension de l’onduleur nourri à l’induction du moteur:
Lecteur de moteur à induction nourri à l’onduleur de tension d’onde carrée est une sorte de convertisseur de liaison CC, qui est un dispositif de conversion en deux étapes. Une alimentation en trois phases est d’abord rectifiée à l’aide d’un redresseur du côté de la ligne.
Le CC rectifié est inversé en AC de la fréquence souhaitée par un onduleur du côté de la charge, comme le montre la figure 4.22. Lorsque la charge ne peut pas fournir la puissance réactive requise pour l’onduleur, l’onduleur doit nécessairement être une force commune.
L’inductance dans le circuit de liaison CC fournit un lissage tandis que la capacité maintient la constance de la tension de liaison. La tension de liaison est une qualité contrôlée.
La tension instantanée aux bornes de la machine (aux bornes de sortie de l’onduleur) est en tout temps directement proportionnelle à la tension de liaison CC (alimentation CC qui est de faible impédance interne) et le courant de la machine (sortie) est fonction de l’admission de charge.
Par conséquent, la charge idéale pour un moteur d’induction nourri à l’onduleur de la source d’onde carrée, compte tenu des harmoniques dans le courant de charge, devrait être très inductive et avoir un faible facteur de puissance.

Par commutation appropriée des thyristors de l’onduleur, la tension de liaison CC est impressionnée à travers les phases du moteur à induction alternativement. La forme d’onde de tension aux bornes de sortie dépend uniquement de cette commutation et de cette conduction de thyristors.
Si les thyristors conduisent 180 ° dans une période, la tension de sortie est sous la forme d’une onde carrée. Dans ce cas, le contrôle de la tension est obtenu au moyen d’un redresseur contrôlé en phase du côté de la ligne.
La tension de liaison CC est variable et la forme d’onde de tension de sortie reste la même à toutes les charges et fréquences. L’onduleur est également appelé onduleur d’onde carré, car la tension de sortie est une onde carrée.
Ces onduleurs ont des problèmes de commutation à des fréquences très basse, car la tension de liaison DC disponible à ces fréquences ne peut pas charger suffisamment les condensateurs de communication pour communiquer les thyristors. Cela met une limite à la fréquence de fonctionnement inférieure.
Pour étendre la fréquence vers zéro, des circuits de charge spéciaux doivent être utilisés. La plage de commande de vitesse de l’onduleur de la source d’onde carrée en onduleur nourri à l’induction fonctionnant sur un onduleur d’onde carré est de 1: 20.
La polarité de la tension de liaison CC ne peut pas être modifiée. Par conséquent, pendant la régénération, la direction actuelle dans le circuit de liaison doit être inversée. Un convertisseur de phase séparé est requis du côté de la ligne pour la régénération, comme le montre la figure 4.22.
Le freinage dynamique peut être utilisé au moyen de résistances commutées. Le comportement dynamique du système n’est pas très bon aux basses fréquences.
Le démarrage doux du moteur est possible. Une machine fonctionnant sur une fréquence variable, le convertisseur de tension variable ne nécessite pas d’équipement de démarrage supplémentaire.
La machine fonctionne normalement sur la partie linéaire de la courbe de vitesse de couple et ne voit pas le couple et le courant verrouillés du rotor dans son départ. La machine a des caractéristiques identiques du point synchrone au point de couple maximal, à chaque fréquence.
Le couple et le courant de la machine peuvent être maintenus constants dans cette plage en faisant varier la fréquence et la tension simultanément et en douceur à un couple et à un courant constants à la vitesse requise, en faisant varier la fréquence du stator et en gardant la fréquence du rotor constant.
L’accélération est en mode contrôlé de glissement de flux constant. Le mode dans lequel le glissement est maintenu constant et le flux est contrôlé (mode de flux de glissement constant) est également possible à des fins de démarrage. Ces méthodes ajoutent à l’efficacité du lecteur.
Lorsque le glissement est utilisé comme quantité contrôlée pour maintenir la constante de flux dans le moteur, le lecteur est appelé lecteur contrôlé par glissement.
En rendant le glissement négatif (c.-à-d. En diminuant la fréquence de sortie de l’onduleur), la machine peut être conçue pour fonctionner comme un générateur et l’énergie des pièces rotatives remontées au convertisseur de ligne supplémentaire ou dissipé dans une résistance pour le freinage dynamique.
En gardant la fréquence de glissement constante (ou un glissement de contrôle), le freinage à un couple et à un courant constants peut être réalisé. Ainsi, le freinage est également rapide.
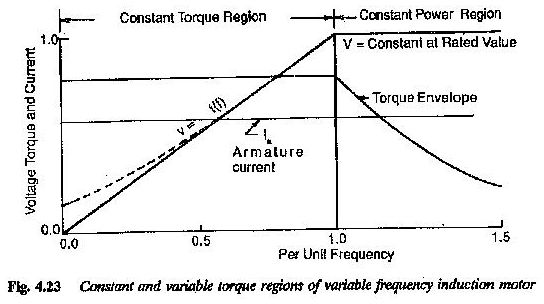
Étant donné que la tension peut être variée pour maintenir le flux constant, le fonctionnement constant de couple est possible jusqu’à la fréquence nominale. Au-delà de la fréquence nominale, la tension reste à sa valeur nominale et la machine fonctionne en mode d’affaiblissement de flux.
Le moteur donne une sortie constante à toutes les vitesses et est appelée mode de puissance de cheval constante. Ces modes sont représentés sur la figure 4.23.
Le moteur reçoit des tensions d’onde carrée. Cette tension a des composants harmoniques. Le courant d’armature résultant est non sinusoïdal, ayant des pics. Ces pics décident en fait de la cote de conception de l’onduleur. Les harmoniques du courant du stator provoquent des pertes supplémentaires et un chauffage.
Le moteur nécessite donc une rétrécation, ou pour une puissance donnée d’un cheval donné, un moteur de surdimension doit être utilisé.
Ces harmoniques sont également responsables des pulsations de couple. La réaction des cinquième et septième harmoniques avec le fondamental donne naissance aux sixième harmoniques développées par le couple.
Pour un onduleur de source de tension d’onde carrée donnée nourri à un moteur à induction nourri à partir d’un onduleur d’onde carré, le contenu harmonique du courant a tendance à rester constant indépendant de la fréquence d’entrée, dans la plage des fréquences de fonctionnement de l’onduleur.
Le pic et les courants harmoniques de la ligne ainsi que le courant du stator sont influencés par la réactance des fuites du moteur. La réactance des fuites est élevée plus petite est la teneur en harmonique et la valeur maximale du courant du stator.
Il est donc nécessaire de choisir un moteur à induction ayant une grande réactance de fuite pour le fonctionnement sur un moteur d’induction nourri à l’onduleur de source d’onde carrée. Comme les courants de pointe sont moindres, l’évaluation de conception de l’onduleur diminue. Le contrôle de la boucle ouverte est possible, mais peut avoir des problèmes de stabilité à basse vitesse.
Le fonctionnement multimotor est possible et la commutation est indépendante de la charge. Le convertisseur représente une source et le moteur peut être branché. Par conséquent, aucune correspondance entre le convertisseur et la charge n’est nécessaire.
En tant que conduite à glisser, un moteur Fed VSI a les caractéristiques supplémentaires suivantes:
Un contrôle de flux indirect peut être obtenu par contrôle de glissement. Comme les quantités à l’état d’équilibre sont spécifiées dans le contrôle, le comportement dynamique peut ne pas être satisfaisant. Un contrôle précis du couple sur une large gamme de vitesses est possible (parfois à l’arrêt).
Il s’agit d’un lecteur très efficace, ayant un très bon facteur d’efficacité et de puissance, lorsque la fréquence de glissement est limitée à la partie linéaire de la courbe de vitesse de couple.
Aucun équipement de départ n’est requis et une accélération très rapide est possible à un couple constant et à un courant. La régénération ou le freinage dynamique est également possible à un couple et à un courant constants. Quatre lecteur de quadrant sont possibles.
Le contrôle de la fréquence en boucle fermée fournit un entraînement à vitesse variable ayant des caractéristiques du moteur CC dans le système Ward Leonard.
Les caractéristiques d’un moteur à induction nourri à l’onduleur de la source d’onde carrée peuvent être résumées comme suit:
1.L’onduleur a impressionné la tension en courant continu de l’amplitude variable.
2.Advantageous pour le lecteur multimotor.
3. La commande est indépendante de charge. Le convertisseur et la charge n’ont pas besoin d’être le convertisseur représente une source à laquelle le moteur peut être branché.
4.Te fréquences de sortie de convertisseur actuelles jusqu’à 1500 Hz sont possibles. Ce disque est très adapté à (moteurs de) opération à grande vitesse. Les disques sont disponibles jusqu’à la notation de 200 kVA.
5.La fréquence de fonctionnement la plus basse limitée par la commutation est d’environ 5 Hz. La plage de vitesse est de 1: 20.
6. Pas adapté à l’accélération sur la charge et les changements de charge soudaine.
7. Le comportement dynamique est assez bon à grande vitesse.
8. Le freinage dynamique est possible. La régénération (quatre opérations quadrantes) nécessite un convertisseur supplémentaire connecté – antiparallèle au côté la ligne. L’inversion de vitesse est obtenue en modifiant la séquence de phase.
9.La tension d’entrée au moteur est non sinusoïdale. Il en résulte des pertes supplémentaires, du chauffage et des pulsations de couple.
10.Motor doit avoir une inductance de fuites suffisamment importante pour limiter les courants de pointe et diminuer le contenu harmonique THP.
11.La le contrôle de la boucle d’ouvre du moteur est possible, mais peut avoir un problème de stabilité à basse vitesse.
12. Le facteur de puissance de la ligne est médiocre en raison du contrôle de phase.
13.Il peut être opéré comme un lecteur contrôlé par glissement.
14.Il trouve l’application comme un entraînement industriel à usage général pour une puissance faible à moyenne.