Variabele frequentieregeling van inductiemotoraandrijving:
Variabele frequentieregeling van inductie Motoraandrijving – Synchrone snelheid, daarom kan het motortoerental worden geregeld door een variabele stroomfrequentie. De spanning geïnduceerd in de stator is evenredig met het product van de voedingsfrequentie en de luchtklaapstroom.
Als de val van de stator wordt verwaarloosd, kan de spanning van de terminal worden beschouwd als evenredig met het product van de frequentie en de stroom.
Elke vermindering van de voedingsfrequentie, zonder verandering in terminalspanning, veroorzaakt een toename van de luchtklaapstroom. De inductiemotoren zijn ontworpen om te werken op het kniepunt van het kenmerk van de magnetisatie om het magnetische materiaal volledig te gebruiken.
Daarom zal de toename van de stroom de motor verzadigen. Dit zal de magnetisatiestroom vergroten, de stroom vervormen en de spanning van de lijn, zal het verlies van kern en het verlies van koper van de stator verhogen en een akoestisch geluid produceren bij hoge open haard.
Hoewel een toename van de stroom buiten de geëvalueerde waarde ongewenst is door de overweging van verzadigingseffecten, wordt ook een afname van de stroom vermeden om het motorkoppelcapaciteit te behouden.
Bijgevolg wordt de regeling van de variabele frequentie van de inductiemotoraandrijving onder de nominale frequentie in het algemeen uitgevoerd bij de nominale luchtklofstroom door een variabele terminalspanning met de frequentie om de verhoudingsconstante (v / f) tot de nominale waarde te behouden. Van de vergelijking. (6.13)
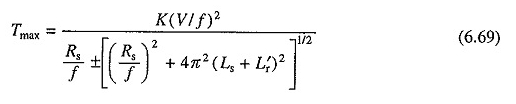
Waar k een constante is en LS en L ′ respectievelijk de stator en de stator zijn, hebben de inductanties van de rotor verwezen. Het positieve teken betreft het functioneren van de auto en het negatieve teken is voor de rembewerking.
Wanneer de frequentie niet laag is, (Rs / F) ≪ 2π (LS + L ′ R) en daarom, van (6.69)

De vergelijking (6.70) suggereert dat met een constante verhouding (v / f) de motor een constant maximumkoppel ontwikkelt, behalve bij lage snelheid (of frequenties). De motor werkt daarom in constante koppelmodus. Volgens Vgl.
(6.69), voor lage frequenties (of lage snelheden) als gevolg van de weerstandsdaling van de stator [dat wil zeggen wanneer (Rs / F) niet te verwaarlozen is in vergelijking met 2π (LS + L ′ R)]] Het maximale koppel heeft een lagere waarde in het functioneren van motoren (teken -Ev) en een grotere waarde in het functioneren van het brak (Sign of Sign -Ve).
Dit gedrag is te wijten aan de vermindering van de stroom tijdens de werking van de auto en de toename van de stroom tijdens het functioneren van het remmen. Wanneer het nodig is dat hetzelfde maximale koppel ook op lage snelheid wordt gehouden, ook bij de werking van de auto, wordt de verhouding (v / f) bij lage frequentie verhoogd.
Dit veroorzaakt een extra toename van het maximale remkoppel en een aanzienlijke verzadiging van de machine bij het functioneren van het remmen.
Wanneer u de nominale waarde hebt of bereikt met de basissnelheid, kan dit niet worden verhoogd met de frequentie. Daarom wordt de frequentie boven de basissnelheid gewijzigd met constante v. Volgens Vgl. (6.70), met V gehouden constant, neemt het maximale koppel af met de toename van de frequentie (of snelheid).
De variatie van de terminalspanning met de frequentie is daarom zoals weergegeven in figuur 6.33 (a). V wordt constant boven de basissnelheid gehouden. Onder de basissnelheidsverhouding (v / f) wordt constant gehouden, behalve bij lage frequentie waarbij de verhouding (v / f) wordt verhoogd om het maximale constante koppel te behouden.
De overeenkomstige koppelcurves worden weergegeven in figuur 6.33 (b) zowel voor de mouw- als rembewerkingen. De krommen suggereren dat snelheidsregeling en rembewerking beschikbaar zijn met een snelheidsnelheid met de snelheid van synchrone snelheid.

Een bepaald koppel wordt verkregen met een lagere stroom wanneer de werking bij elke frequentie beperkt is tussen de synchrone snelheid en het maximale koppelpunt, zowel voor automatische bewerkingen als remmen.
Bijgevolg is de werking van de motor voor elke frequentie beperkt tussen de synchrone snelheid en het maximale koppelpunt, zoals weergegeven door de volledige lijnen van figuur 6.33 (b).
Variabele frequentiecontrole van inductie -motoraandrijving biedt goede bedrijfsprestaties en tijdelijk vanwege de volgende kenmerken:
- Snelheidsregeling en rembewerking zijn verkrijgbaar van nulsnelheid tot bovenste basissnelheid.
- Tijdens de transiënten (start -up, remmen en snelheidsomkering), kan de bewerking worden uitgevoerd met maximaal koppel met een verminderde stroom, wat een goed dynamisch antwoord geeft.
- Koperverliezen zijn laag en de efficiëntie en vermogensfactor zijn hoog omdat de werking beperkt is tussen synchrone snelheid en het maximale koppelpunt bij alle frequenties.
- De daling van de snelheid van het gebrek aan volledige belasting is klein.
Het belangrijkste voordeel van de variabele frequentiebeheerregeling van de inductiemotor is dat deze een variabele aandrijving mogelijk maakt met een goede bedrijfsfunctie en overgangsprestaties hierboven van een eekhoornkooi -inductiemotor.
De eekhoornkooi -engine heeft een aantal voordelen in vergelijking met een DC -motor. Het is goedkoop, robuust, betrouwbaar en duurzamer.
Vanwege de afwezigheid van een schakelaar en borstels, vereist het praktisch geen onderhoud, het kan worden benut in een explosieve en vervuilde omgeving en kan worden ontworpen voor hogere snelheden, spanningen en energiedimensies. Het heeft ook lagere traagheid, volume en gewicht.
Hoewel de kosten van een eekhoornkooi -motor veel lager zijn in vergelijking met die van een continue huidige motor met dezelfde noot, zijn de totale kosten van motorinductiemotortraining in het algemeen hoger.
Maar vanwege de hierboven genoemde voordelen, hebben de variabele frequentie -inductiemotorlezers de voorkeur boven de CC -motorschijven voor de meeste toepassingen.
In speciale toepassingen die onderhoudsvrije werking vereisen, zoals ondergrondse en onderwaterinstallaties, evenals in toepassingen met explosieve en vervuilde omgevingen, zoals in mijnen en de chemische industrie, zijn motorlezers met variabele frequentie-inductie een natuurlijke keuze.
Ze hebben verschillende andere applicaties zoals tractie, molentafels, staalfabriek, pompen, ventilatoren, blazers, compressoren, spitters, dragers, machinegereedschap, enz.
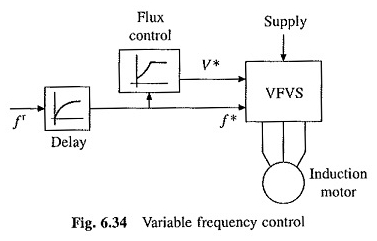
Het blokdiagram van de variabele frequentiecontrole van het inductiemotor -rijschema wordt geïllustreerd in figuur 6.34. De motor wordt geleverd uit een variabele spanningsbron van variabele frequentie (VFV). V * en F * zijn spanning- en frequentiebeheerders voor VFV’s.
Het stroomregelblok produceert een spanningsopdracht V * voor VFV’s om de relatie van figuur 6.33 (a) tussen v * en f * te handhaven. De referentiefrequentie F * wordt gewijzigd met controlesnelheid.
Een vertragingscircuit wordt geïntroduceerd tussen F * en FR, zodat zelfs wanneer FT door een grote hoeveelheid wordt gewijzigd, F * alleen langzaam zal veranderen zodat het motortoerental de FT -veranderingen kan volgen, waardoor de motorbewerking wordt beperkt voor elke frequentie tussen de synchrone snelheid en het maximale koppelpunt. VFV’s kunnen een spanningsbronomvormer of een cycloconverteur zijn.
Snelheidsnelheidsregeling:
Laat V en F de nominale spanning en frequentie van de machine zijn. Wanneer de motor onder de basissnelheid wordt gebruikt met een constante regeling (v / f), zal de terminalspanning voor een frequentie, kf, kv zijn, waarbij k een factor is zoals 0 ≤ k ≤ 1. Dus, omdat de frequentie is toegenomen van 0 tot f, k gaat van 0 tot 1 en dat de spanning verandert van 0 tot V.
Het vervangen van de KV -spanning en de KF -frequentie en het verwaarlozen van de weerstandsvallen van de stator, vergelijkingen (6.4) en (6.10)
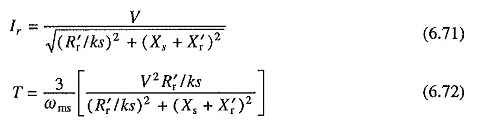
In vergelijkingen. (6.71) en (6.72) Als (ks) constant wordt gehandhaafd omdat k gevarieerd is, dan blijft de stroom van de rotor I’r en het paar t constant. Omdat de verschuiving klein is, zal de R in overeenstemming zijn met de spanning. Omdat de stroom constant is, zal IM ook constant zijn. NU
![]()
Dus als de werking van de motor wordt uitgevoerd met een constante waarde van KS als de frequentie gevarieerd is, werkt de motor op een constante stroom en een koppel. Laten we de betekenis van KS onderzoeken.
Op de KF -frequentie
Opmerking ωst is de schuifsnelheid, wat het verschil is in de roterende veldsnelheid Kωms en de snelheid van de rotor ωm. Het is ook de daling van het motortoerental zonder belasting, wanneer de machine wordt geladen.
De bovenstaande discussie laat zien. Dat voor elke waarde van T de daling van de motorsnelheid uit de laadsnelheid (kωms) hetzelfde is voor alle frequenties. Daarom zijn de kenmerken van het machinestapkoppel voor 0
Het functioneren van de machine met een constante schuifsnelheid omvat ook werking bij een constante rotorfrequentie zoals hieronder aangegeven

waarbij FR en ωr respectievelijk de frequentie van de rotor in Hz en rad / sec zijn.
Voor s> (xs + x′r), daarom van de vergelijkingen. (6.72) en (6.73)

Eqn. (6.76) suggereert dat voor s
Afhankelijk van de bovenstaande discussie, voor een schuifsnelheid, hebben de motorstroom en het koppel dezelfde waarden bij alle frequenties. Aldus kunnen de motorstroom en het koppel worden geregeld door de schuifsnelheid te regelen.
Bovendien kan de motorstroom binnen een veiligheidslimiet worden beperkt door de schuifsnelheid te beperken. Dit gedrag wordt gebruikt in een gesloten lussnelheidsregeling om de stroom binnen een geautoriseerde limiet te beperken.
Laten we vervolgens de bewerking boven de basissnelheid overwegen. Zoals eerder aangegeven, werkt de machine op een constante spanning V. Nu

Aangezien de frequentie groter is dan de noot k> 1. Aangezien de bewerking opnieuw beperkt is tussen synchrone snelheid en maximale koppel, heeft de verschuiving een kleine waarde daarom

Dus voor snelheden boven de basissnelheid, tot een gegeven en dus ongeveer tot een donatie, neemt de schuifsnelheid ωSL lineair toe met K (of frequentie). Dit gedrag wordt gebruikt in een gesloten lussnelheidsregeling om de stroom in de geautoriseerde waarde boven de basissnelheid te beperken.
Omdat de verschuiving klein is, is de R in lijn met V. Als het machineverlies van de machine wordt verwaarloosd, wordt het ontwikkelde vermogen gegeven door
![]()
Daarom is de PM constant voor een gegeven, en daarom voor een IS. De lezer werkt daarom in de constante stroommodus.
Koppel- en stroombeperkingen en bedrijfsmodi:
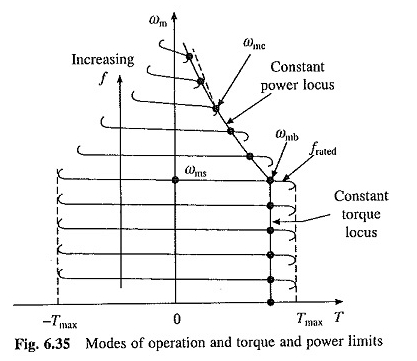
Variaties in koppel en vermogen voor een gegeven statorstroom en voor frequenties onder en boven de nominale frequentie worden weergegeven door punten in figuur 6.35.
Wanneer de statorstroom de maximale geautoriseerde waarde heeft, vertegenwoordigen deze het maximale koppel en de motorvoorzieningscapaciteiten in de variabele frequentiecontrole van de inductiemotoraandrijving.
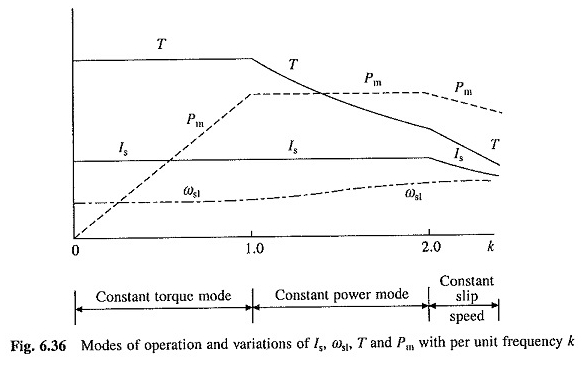
De variatie in maximale koppel en stroomcapaciteiten met frequentie wordt weergegeven in figuur 6.36. De variatie in de schuifsnelheid ωSL met de frequentie wordt ook weergegeven op deze figuur.
Zoals getoond in Fig. 6.35 en 6.36, heeft de motor een constant maximumkoppel van nul naar basissnelheid ωmm, zodat de lezer werkt in de constante koppelmodus. In dit frequentiebereik wordt v gemodificeerd met de frequentie zoals getoond in Fig.
6.33 (a) en de snelheid van de maximaal geautoriseerde stroom blijven constant. Van basissnelheid tot snelheid ωmc, het maximale vermogen heeft een constante waarde, dus de motor werkt in constante vermogensmodus. Bij snelheid ωmc (Fig. 6.35) wordt het faalkoppel bereikt.
Elke poging om de motor te bedienen in de maximaal geautoriseerde stroom buiten deze snelheid zal de motor vasthouden. Bijgevolg werkt de machine na de ωMC -snelheid bij een constante schuifsnelheid en de maximale geautoriseerde stroom en het maximale vermogen kunnen afnemen (Fig. 6.36).
Nu vermindert de motorstroom omgekeerd omgekeerd met snelheid en het koppel neemt omgekeerd af naarmate de snelheid vierkant is. De werking in deze regio is vereist in de schijven die een breed snelheidsbereik vereisen, maar een laag koppel bij hoge snelheden.
In tractietoepassingen werkt de lezer bijvoorbeeld in deze regio wanneer hij op volle snelheid werkt, omdat het koppel dat nodig is in evenwicht met hoge snelheid zeer laag is in vergelijking met de waarde ervan tijdens versnelling.