Kontrola zorientowana na silnik indukcyjny: Silnik indukcyjny:
Podczas przesuwanych krążków kontrolowanych za pomocą VSI lub CSI omówione w poprzednich sekcjach, napięcie stojana lub prąd stojana jest kontrolowany przy użyciu częstotliwości poślizgu. Są one kontrolowane wyłącznie w amplitudzie.
Kontrola prądu stojana nie obsługuje jego pozycji fazowej w porównaniu z przepływem. Kontrola nie zapewnia zadowalających zachowań dynamicznych. Istnieje odpowiedź oscylacyjna na zmiany częstotliwości wirnika.
Dynamiczną odpowiedź można ulepszyć, stosując zasadę zorientowanej na kontrolę silnika indukcyjnego, w którym prąd stojany jest kontrolowany zarówno pod względem amplitudy, jak i w pozycji fazowej w porównaniu z przepływem.
Kontrolując uziemienie silnika indukcyjnego prąd stojana ma funkcję zapewniania przepływu i momentu obrotowego.
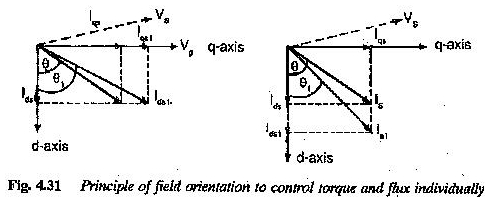
Silnik indukcyjny będzie miał operację podobną do silnika, jeśli komponenty prądu stojana, a mianowicie produkcja przepływu i produkcja momentu obrotowego są kontrolowane osobno (ryc. 4.31).
W rzeczywistości jest tak w przypadku silnika prądu ciągłego, w którym moment obrotowy zależy od prądu zbrojenia i przepływu prądu pola. Istnieje między nimi oddzielenie, ale w przypadku efektów reakcji ramy.
Efekty te można wyeliminować poprzez kompensację uzwojeń, a osobno w podekscytowanym silniku CC występuje idealne oddzielenie. Ten rodzaj odsprzęgania jest kuszony w kontrolowaniu silników indukcyjnych. Zasada nazywana jest orientacją na ziemi lub kontroli wektora.
Ta kontrola poprawia dynamiczną wydajność czytnika przy wszystkich prędkościach. Prąd stojana jest podzielony na dwa komponenty jeden wzdłuż osi D, a drugi wzdłuż osi Q.
Osie odniesienia zostały wybrane w taki sposób, że przepływ wirnika jest całkowicie dostępny wzdłuż osi bezpośredniej. Jego składnik kwadratowy wynosi zero.
Zatem element prądu wzdłuż osi D jest producent składowy przepływu, a wzdłuż osi Q jest składnikiem momentu obrotowego producenta. Zmieniając te elementy niezależnie, możemy mieć niezależną kontrolę nad przepływem i kontrolą pary. Są one reprezentowane na ryc.
4.31 (a) i (b). W pierwszym, zmienność przepływu jest wskazywana przez zmienną składnik osi bezpośredniej prądu, podczas gdy w drugiej zmienności składnika osi q stojana jest reprezentowana.
W konsekwencji kontrola prądu stojana jest równoważna nie tylko zmienności jego wielkości, ale także z jej kątem fazowym. Metoda jest zatem nazywana kontroli wektora.
Techniki kontroli wektorów stosowane w celu utrzymania stałego przepływu przestrzeni powietrza nadają słabe charakterystyki dynamiczne do treningu, ponieważ moment obrotowy podąża za częstotliwością przesuwaną z opóźnieniem. Opracowano techniki, aby utrzymać stały przepływ wirnika.
W tych metodach para jest niezwłocznie podąża, poprawiając w ten sposób dynamiczne zachowanie. Dynamika wysokiej jakości jest również niezbędna dla kontroli zorientowanej na podłoże silnika indukcyjnego używanego jako siłownik.
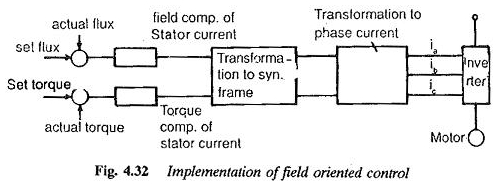
Rysunek 4.32 ilustruje wdrożenie zasady orientacji na ziemi. Rzeczywista wartość przepływu wirnika jest porównywana z wartością odniesienia, a w ten sposób uzyskany błąd jest używany do kontrolowania komponentu osi bezpośredniej prądu.
Zwykle komponent ten jest utrzymywany, tak aby przepływ wirnika był stały. Składnik osi kwadratowej jest kontrolowany za pomocą sygnału błędu uzyskanego z porównania rzeczywistego momentu obrotowego i momentu odniesienia. Składniki znajdują się w strukturze obrotowej w sposób synchroniczny.
W konsekwencji oddzielenie między składnikami produkcji przepływów a produkcją momentu obrotowego wzmocnienia wymaga systemu współrzędnych odniesienia i transformacji ilości w tym ramie odniesienia, a na koniec w ramach stojana,
W tej kontroli, która zapewnia bardzo dobre zachowanie dynamiczne bez przejściowego udaru pary, wymagany jest przepływ wtórny, który można udostępnić na dwa sposoby:
1. Bezpośrednio za pomocą cewek wykrywania przepływu.
2. Pośrednie oszacowanie przepływu za pomocą modelu maszyny, przy użyciu łatwo mierzalnych wielkości terminali, takich jak napięcia i prądy.
Pierwsza metoda z wykorzystaniem bezpośredniego pomiaru daje dobre wyniki i jest prawdopodobnie najbardziej precyzyjną metodą sterowania. Pomiar przeprowadzany jest za pomocą cewek badawczych, sond hall lub innej techniki pomiaru przepływu.
Zmierzony przepływ służy do oczyszczonego oddzielenia między składnikami produkcji momentu obrotowego a produkcją przepływu prądu stojana. Metoda jest zasadniczo niewrażliwa na zmiany parametrów. Jednak silnik klatki traci swoją odporność i prostotę budowy.
Jeśli spróbujemy zachować solidność i prostotę silnika, przepływ uzyskuje się przy użyciu drugiej metody. Przepływ wirnika jest szacowany na podstawie wektora napięcia stojana, wektora prądu i prędkości wirnika. Ten szacowany przepływ jest zasilany kontrolerem momentu obrotowego.
Takie podejście jest wrażliwe na błędy w parametrach. Rezystancja wirnika, wycieki i inne parametry należy określić z precyzją, aby osiągnąć wydajność równoważną bezpośrednie pomiar.
Niestety parametry silnika zastosowane w obliczeniach są określone na podstawie testów próżniowych i nie reprezentują wartości parametrów faktycznie obecnych w punkcie operacyjnym.
Ponadto parametry te różnią się znacznie w zależności od nasycenia, temperatury, częstotliwości i amplitudy prądu. Wtórny poziom przepływu można zmodyfikować przez zmienność parametrów. Te zmiany parametrów powodują błędną kontrolę przepływu, co pogarsza wydajność dynamiczną.
Aby uniknąć błędów z powodu zmienności wartości parametrów (głównie rezystancji wirnika), albo ze względu na nieprawidłowe oszacowanie, albo ze względu na warunki pracy silnika zastosowano identyfikację lub dostosowanie parametrów automatycznych.
Metody identyfikują zmiany wydajności ze względu na zmianę parametrów i odpowiednio korygują parametry.
Błąd między szacunkową wartością przepływu a pożądanym przepływem w silniku służy do skorygowania najbardziej wpływowego parametru, którym jest rezystancja wirnika lub stałą czasową wirnika, dzięki czemu model maszyny podaje wymaganą wartość przepływu bez żadnego błędu.
Inną omówioną niedawno metodą jest technika internetowa ustanawiająca dokładną wartość odporności na wirnik silnika indukcyjnego. Identyfikacja uzyskuje się przez wstrzyknięcie prądu sekwencji ujemnej i wykrywanie napięcia sekwencji ujemnej.
Wartość rezystancji wirnika jest obliczana za pomocą informacji. Kontrola zorientowana na ziemię silnika indukcyjnego koryguje wartość oporu na wirnik bez potrzeby czujnika termicznego.
Do identyfikacji parametrów stosuje się również metody sprzężenia zwrotnego obserwatorów stanu.
Wraz z pojawieniem się mikroprocesorów (μP) i mikrokomputerów można teraz skutecznie rozwiązać problemy związane z dyskami z systemem treningowym. Wektor przepływu można bardzo łatwo określić.
Aby przeprowadzić dopasowanie modelu silnika i identyfikację parametrów wirnika za pomocą procedury korelacji, μP może być bardzo skuteczny bez żadnej dodatkowej miary.
ΜPS ułatwia również wdrożenie wyrafinowanych algorytmów w celu wygenerowania sekwencji strzelania falownika.
Ponadto proces opracowany w zorientowanej na terenie kontroli ogólnego systemu szkoleniowego stał się ekonomicznie wykonalny, ponieważ używany do tej pory drogie sprzęt można teraz zastąpić oprogramowaniem.
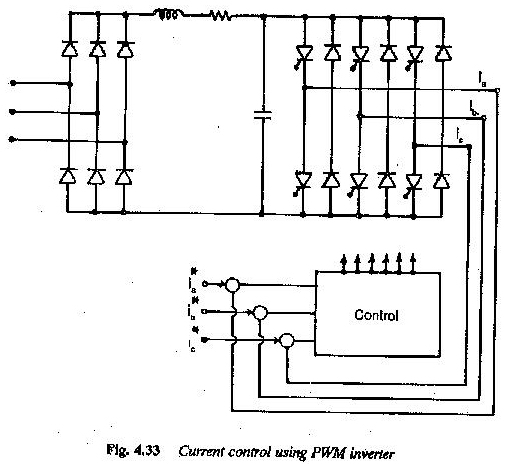
Orientację pola można bardzo łatwo wdrożyć przy użyciu CSI zasilania sterowaniem zorientowanym na silnik silnika indukcyjnego. Ponieważ falownik PWM ma dobre zachowanie dynamiczne, są one używane z prądem kontrolnym z boku wyjścia.
Rysunek 4.33 ilustruje zasadę kontroli prądu za pomocą falownika PWM. Ma to zalety VSI i CSI.
Motorboty indukcyjne w trybie przepływu przepływu:
W przypadku silników prądu ciągłego prędkości powyżej podstawowej prędkości uzyskuje się poprzez zmniejszenie prądu pola do stałego napięcia integracji. Para rozwinęła się zmniejsza. Tryb stałego zasilania może być przeprowadzany w tym zakresie prędkości i nazywa się przepływem przepływu.
Podobne zachowanie można zaobserwować w przypadku silników indukcyjnych. Napięcie osiąga wartość nominalną dla częstotliwości nominalnej. Dla częstotliwości powyżej tej wartości napięcie napinacza jest utrzymywane stałe. Prędkość silnika wzrasta proporcjonalnie do częstotliwości.
Ze względu na wzrost częstotliwości przepływ przestrzeni powietrznej maleje. Moment obrotowy przy danej częstotliwości wirnika jest odwrotnie proporcjonalny do kwadratu częstotliwości stojana, a rozwinięta moc nie jest stała. Dynamiczne zachowanie w osłabionych warunkach przepływu jest bardzo słabe. Można to poprawić przez zmienną częstotliwość przesuwaną dla maksymalnego momentu obrotowego proporcjonalnego do częstotliwości.
Silnik o bieżącym zasilaczu ma dobre zachowanie dynamiczne, gdy na falowniku występuje napięcie rezerwowe.
Po osiągnięciu pewnej wyższej wartości częstotliwości tylny emf silnika jest równy zastosowanemu napięciu i nie ma napięcia rezerwowego do kontroli prądu.
Rzeczywista wartość przepływu stojana i wirnika odbiega od pożądanych wartości, a czytelnik ma dynamiczne złe zachowanie. Poprawa wydajności silnika dynamicznego w trybie osłabienia gruntów stanowi problem.
Można tego dokonać poprzez kontrolowanie amplitudy strumienia wirnika, a tym samym tylnego EMF, tak aby wystarczająca rezerwa napięcia była dostępna w zakresie prędkości powyżej podstawowej prędkości. Tutaj można również zastosować bezpośrednie i pośrednie metody kontroli przepływu.